Piezo LEGS® Vacuum Capable and Non-magnetic Linear Motors and actuators
High precision linear piezoelectric actuators and piezo motors with exceptional size to force ratio. Non-magnetic, vacuum capable with nanometer resolution.
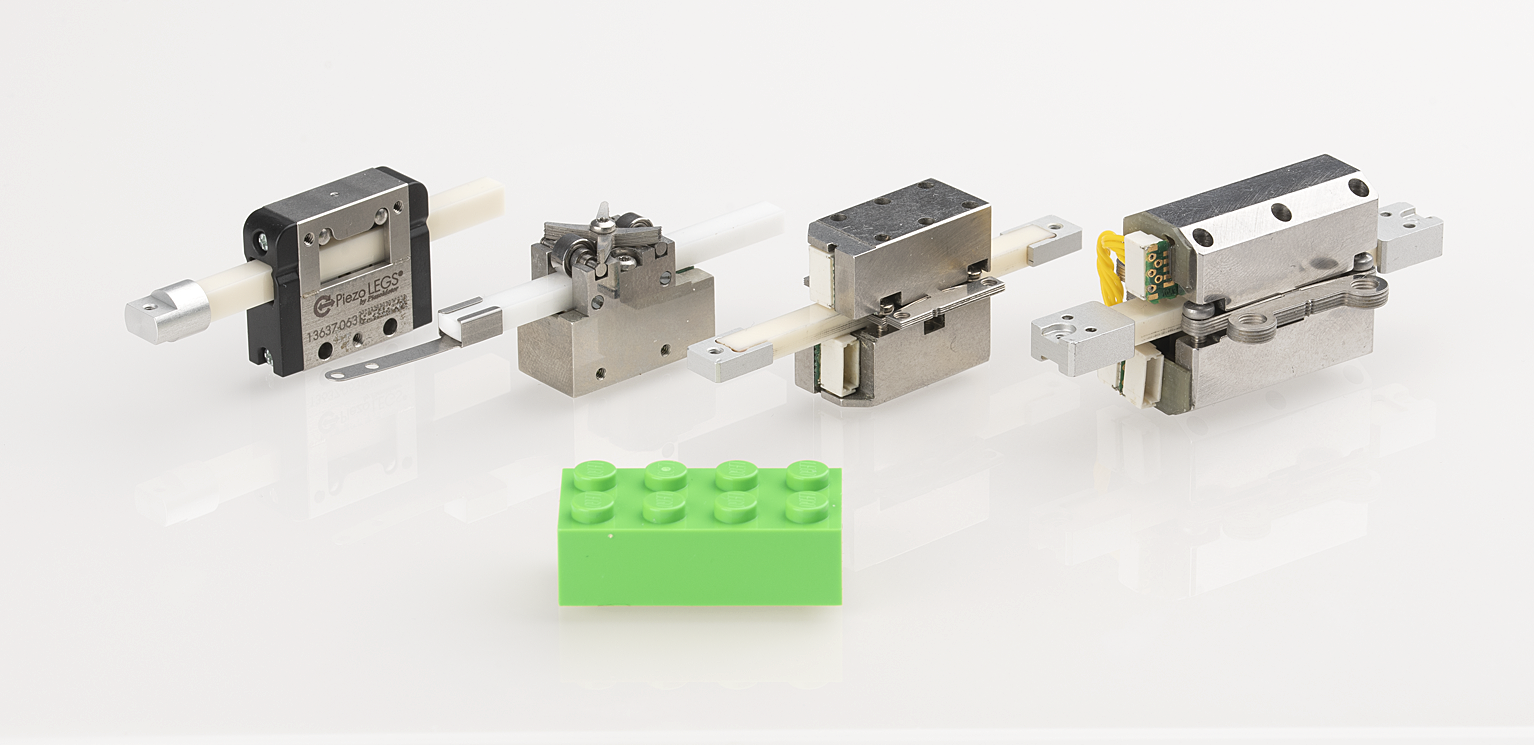
Our “off the shelf” standard 6.5 – 40N range of Piezo Motors and linear actuators

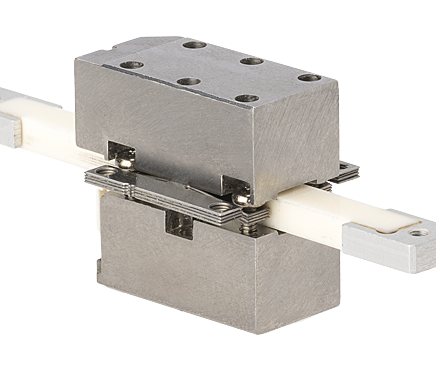

Linear 300N, vacuum capable actuator
True Linear Direct drive, self locking with no backlash. Vacuum capable.
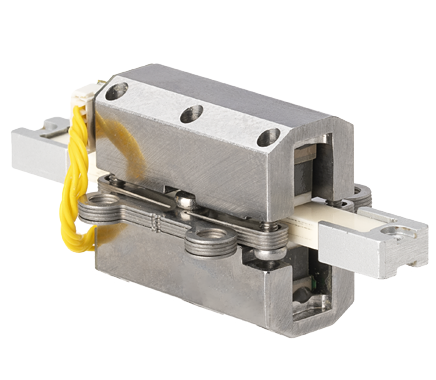
Linear 450N, vacuum capable actuator
True Linear Direct drive, self locking with no backlash. Vacuum capable.
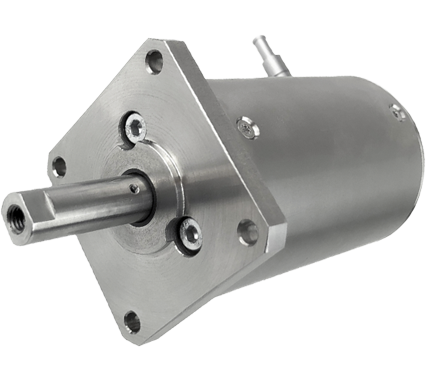
Linear 40N, covered motor
True Linear Direct drive, self locking with no backlash. Covered to shield it from dirt and dust. Normal environments


Not finding exactly what you are looking for?
Let our engineers help you with your project.
The Piezo LEGS® linear motors / piezoelectric actuators are a perfect match for demanding OEM motion solutions
Exceptional size to force ratio and true linear motion
Few components result in compact motors and actuators. No need for gears, spindles or mechanical transmissions to achieve linear motion
Vacuum capable and non-magnetic
The option of motor housings in non-magnetic alloys and ceramic drive units results in actuators with a magnetic flux density lower than 1 nT at 10mm distance. They do not generate magnetic fields or are affected by magnetic fields. No problem in an MRI machine or in cellular applications.
Extreme precision – No Backlash and Self locking
The LEGS® Piezo Motors can easily position down to sub-nanometer levels if needed. The friction drive locks the drive rod in place without any power draw and there is basically no backlash. The motor reacts instantly both in starting and stopping. An overview of the most common piezo motor types is available here.
Response Time and High-Speed Dynamics results in rapid and precise positioning
Piezo actuators are renowned for their exceptional response times and high-speed dynamics, making them ideal for applications requiring rapid and precise positioning. These actuators can achieve nanometer-level precision in motion control and maintain stability even at speed, making them indispensable in fields like microscopy, semiconductor manufacturing, and optics.
Speed and step length
The speed of the actuator is depending on step length and drive frequency. The indicated maximum speed on the product pages is in normal environment and for continuous operations. Under intermittent conditions and with specific controllers, you can greatly increase the speed. Contact us for further information. The environment and payload heavily affect the step length.
Precision guiding and integrated encoders
Most models are available with integrated encoder and precision guiding.
Piezo Motor and Piezoelectric Linear Actuator Starter Kits
Our Starter Kits are designed to simplify evaluation and accelerate development. Available in multiple configurations, they provide everything needed to begin testing and integrating your selected motor platform.
Each kit includes the required components to evaluate the motor.
