Piezo LEGS® Rotary, 80mNm torque
A 80mNm torque output version for normal environments. Built-in encoder or with extended shaft for customer encoder customization.

Rotary Piezo Motor with built in encoder and 80mN, torque output
- Rotary direct drive
- Built in encoder
- 80mNm torque output
- Self-locking
- No backlash
Piezo LEGS® Rotary LR23-80
This is our rotary Piezo LEGS®, with direct drive and 80mNm torque output. The i gives closed loop resolution of 0.2 mrad (0.01°), while open loop resolution is sub-microradian. Full force power-off locking is a safety function inherent to the design. Not designed for vacuum and magnetic environments.
LR23-80 product portfolio
- with encoder
- without encoder
- without encoder and with extended shaft
Specifications Piezo LEGS® LR23-80
| Type | Standard (A) | Standard (A), ext. shaft | Standard (A), encoder | Unit |
| Diameter | 23 | mm | ||
| Angular range | 360 | ° | ||
| Speed Range @ Rhomb, no load, 20°C | 0-160 (0-27 rpm) | °/s | ||
| Step angle, full step @ Delta, no load, 20°C | 550 | µrad | ||
| Motor resolution 14 bits, 8192 microsteps | <1 | µrad | ||
| Built in encoder | No | No | Yes | |
| Encoder type | N/A | N/A | Optical quadature | |
| Encoder resolution | N/A | N/A | 0.4 | mrad |
| Stall torque | 80 | mNm | ||
| Holding torque | >80 | mNm | ||
| Recommended operating range | 0-40 | mNm | ||
| Operating voltage | 42-48 | V | ||
| Power consumption | 7 | mW/Hz | ||
| Shaft load, max radial, 6.5 mm from mounting face | 3 | N | ||
| Shaft load, max axial | 2 | N | ||
| Shaft press fit force, max | 5 | N | ||
| Mechanical size L x H x D | ? x ? | ? x ? | ? x ? | mm |
| Weight | 65 | 68 | 80 | g |
| Connector motor | Soldered cable w. JST 05SR-3S | Soldered cable w. JST 05SR-3S | Cable attached, driver dependent | |
| Material in motor housing | Stainless steel | |||
| Operating temperature | -20 to +70 | ºC | ||
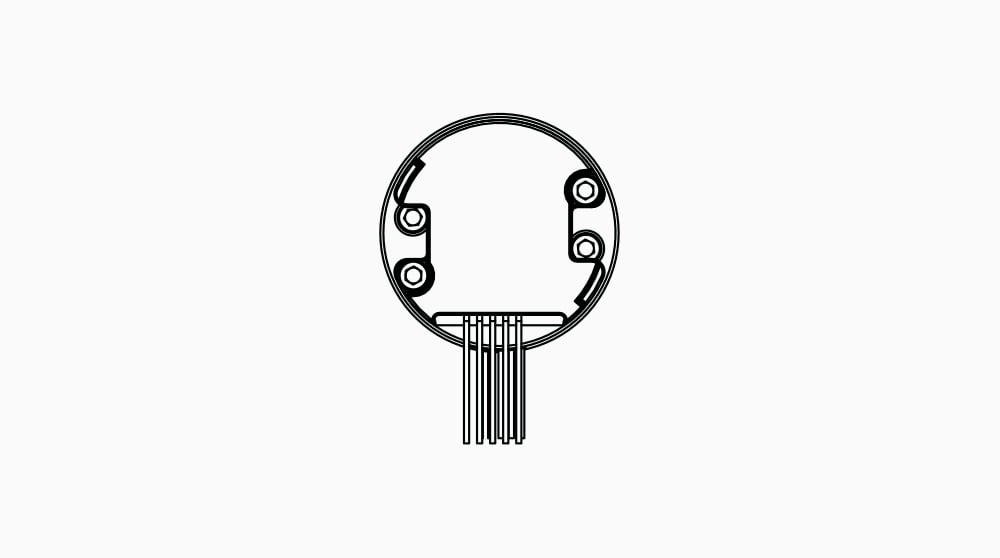
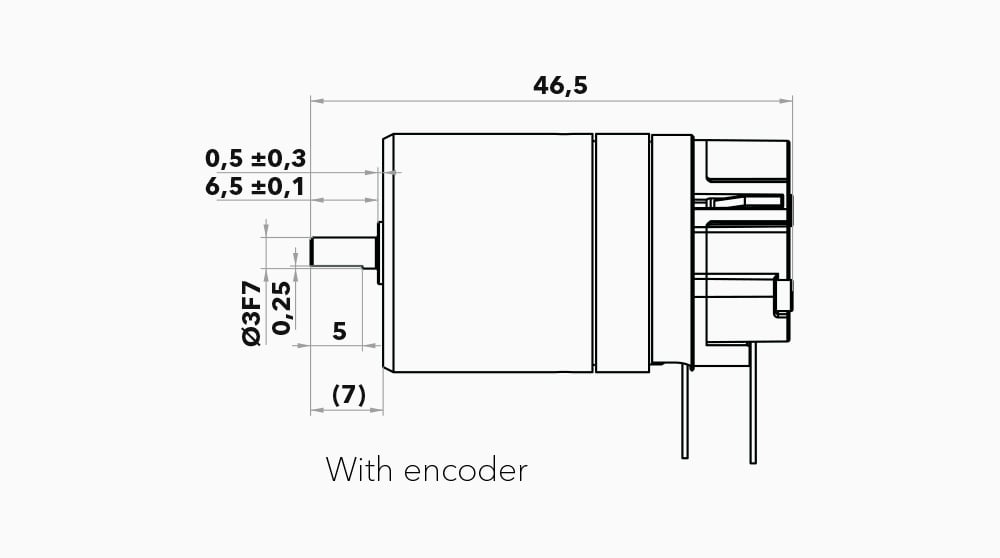
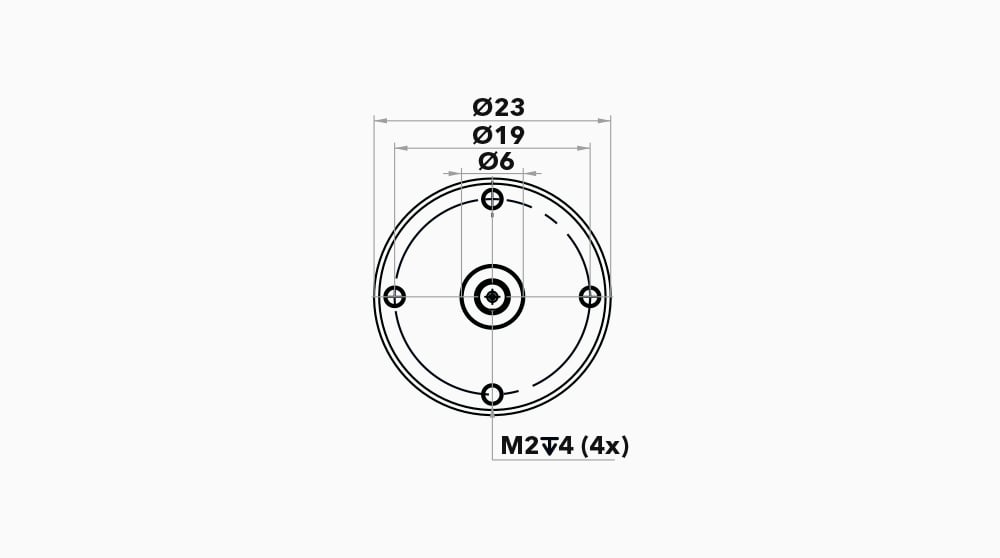
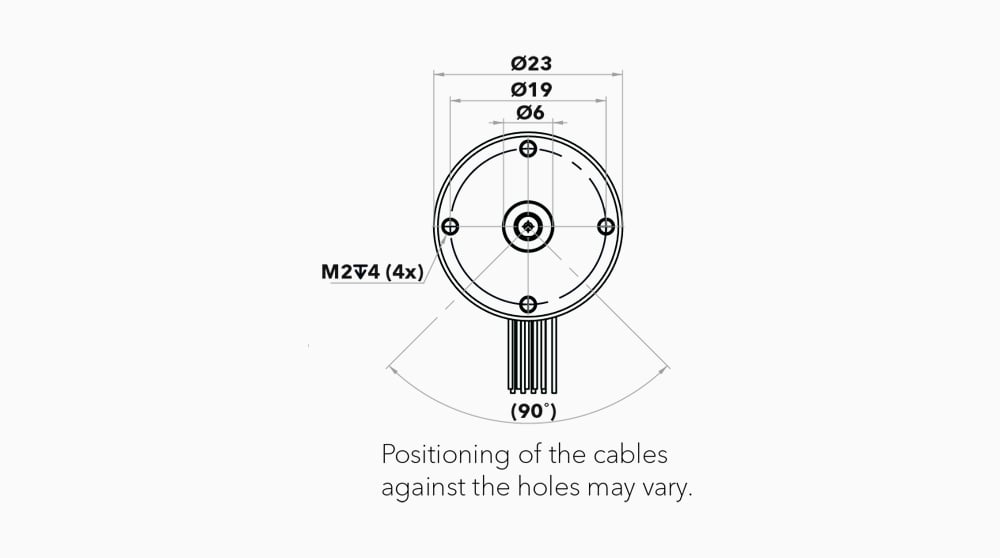
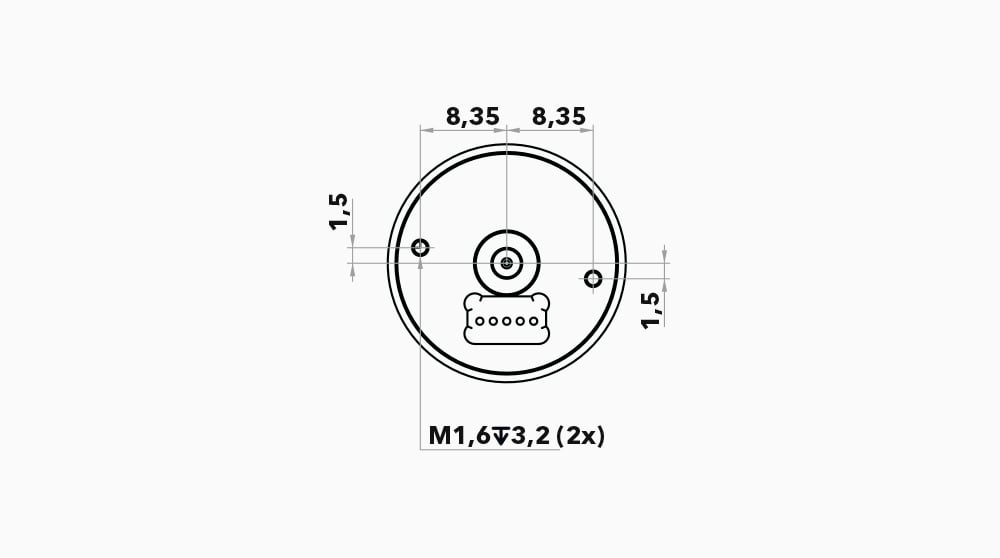
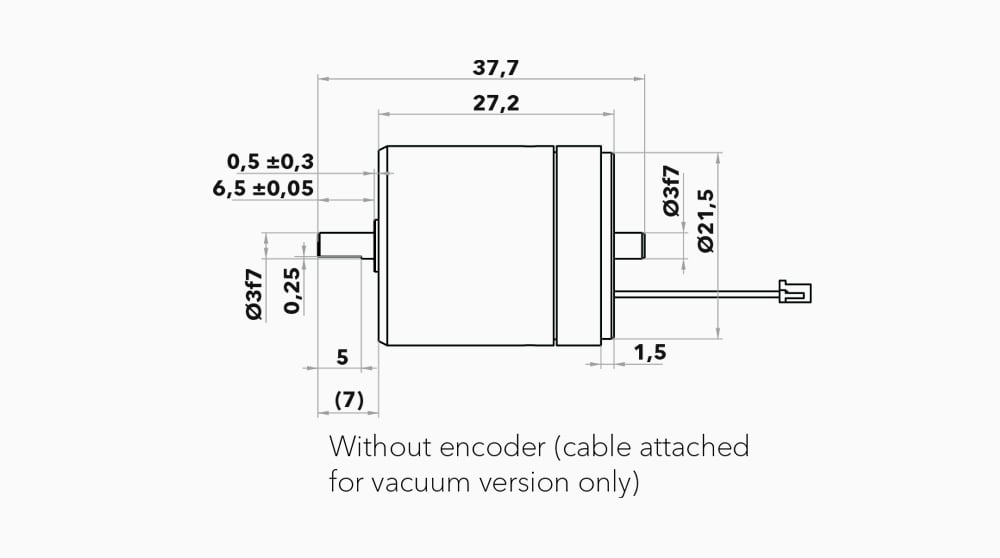
Main dimensions LR23-80
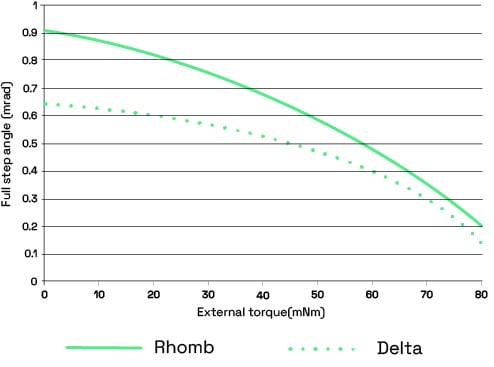
Motor performance
Motor performance with waveform Rhomb (filled) and waveform Delta (dotted). The full step length is the average distance the drive rod moves when the legs take one full step (i.e. for one waveform cycle).
Note: A standard deviation σ of 0.5 μm should be taken into account.
Typical values are given for 20ºC.
Motor speed at 20 ºC no load
|
Waveform
|
Max feq. (Hz)
|
Speed range (mm/s)
|
|
Delta
|
3000
|
0–19 rpm (0–114°/s)
|
|
Rhomb |
0–27 rpm (0–160°/s)
|

Controlling the motor
Our motor control units come in many different versions, with controllers and amplifiers for laboratory use as well as for integration into OEM devices.
We can also license the drivers for customers that want to build their own driver electronics.

Starter Kit
Our Starter Kits are designed to simplify evaluation and accelerate development. Available in multiple configurations, they provide everything needed to begin testing and integrating your selected motor platform.
Each kit includes the required components to evaluate the motor.
