Piezo LEGS® ロータリー, 80mNm トルク
通常環境用の80mNmトルク出力バージョン。エンコーダ内蔵、またはお客様のエンコーダカスタマイズのための延長シャフト付き。

ロータリー (エンコーダ内蔵、トルク出力80mN)
- ロータリー 駆動
- 内蔵エンコーダ
- トルク出力80mNm
- 自動ロック
- バックラッシュなし
Piezo LEGS® ロータリー
これは当社のロータリー Piezo LEGS®、ダイレクトドライブ方式を採用し、80mNmのトルク出力を有します。iはクローズドループ .2 mrad(0.01°)を実現し、オープンループ分解能はサブマイクロラジアンレベルです。推力 設計に内在する安全機能です。真空環境および磁気環境での使用には設計されていません。
LR23-80製品ポートフォリオ
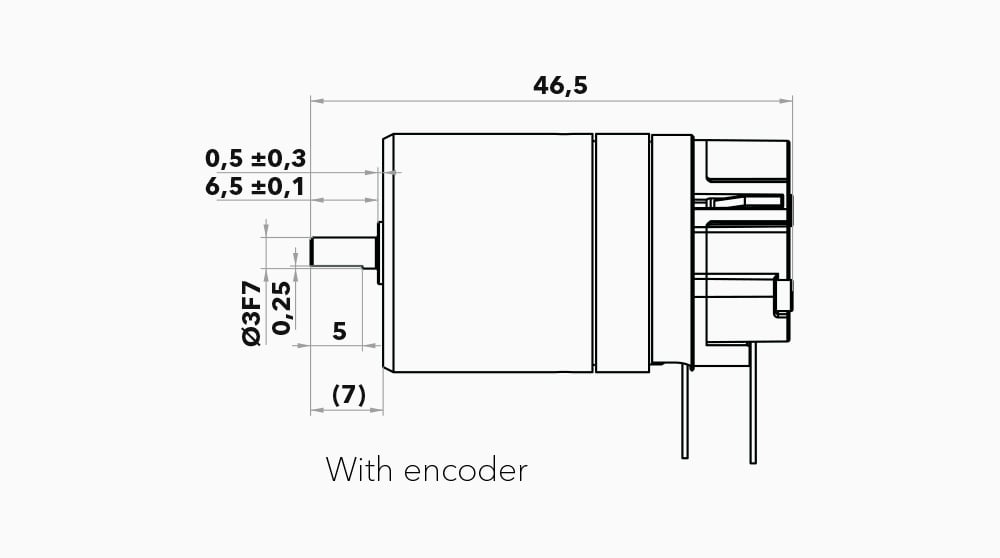
- エンコーダ付き
- エンコーダなし
- エンコーダなし、延長シャフト付き
仕様Piezo LEGS®
| 種類 | 標準 (A) | 標準(A)、エクステンションシャフト | 標準 (A)、エンコーダ | 単位 |
| 直径 | 23 | mm | ||
| 角度範囲 | 360 | ° | ||
| 回転数範囲: (菱形配置、無負荷、20°C) | 0-160(0-27rpm) | 秒⁻¹ | ||
| ステップ角、フルステップ @ Delta、無負荷、20°C | 550 | μrad | ||
| モーター分解能 14ビット、microsteps | <1 | μrad | ||
| 内蔵エンコーダ | いいえ | いいえ | はい | |
| エンコーダタイプ | N/A | N/A | 光学四脚 | |
| エンコーダ分解能 | N/A | N/A | 0.4 | マッド |
| ストールトルク | 80 | mNm | ||
| 保持トルク | >80 | mNm | ||
| 推奨動作範囲 | 0-40 | mNm | ||
| 動作電圧 | 42-48 | V | ||
| 消費電力 | 7 | mW/Hz | ||
| シャフト荷重(最大) (ラジアル)、mm 6.5mm | 3 | N | ||
| シャフト荷重、最大 (軸方向) | 2 | N | ||
| 軸の圧入推力, 最大 | 5 | N | ||
| 外形寸法(幅×高さ×奥行き) | ? x ? | ? x ? | ? x ? | mm |
| 重量 | 65 | 68 | 80 | g |
| コネクタモーター | はんだ付けケーブル(JST付) 05SR-3S | はんだ付けケーブル(JST付) 05SR-3S | ケーブル付属、 ドライバーに依存 | |
| モーターハウジングの材質 | ステンレス鋼 | |||
| 動作温度 | -20~+70 | ℃ | ||
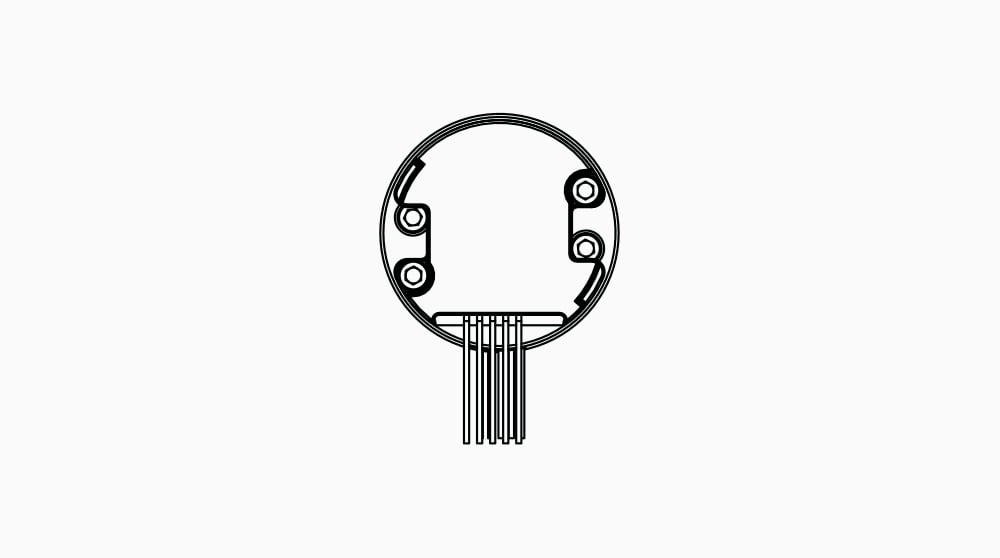
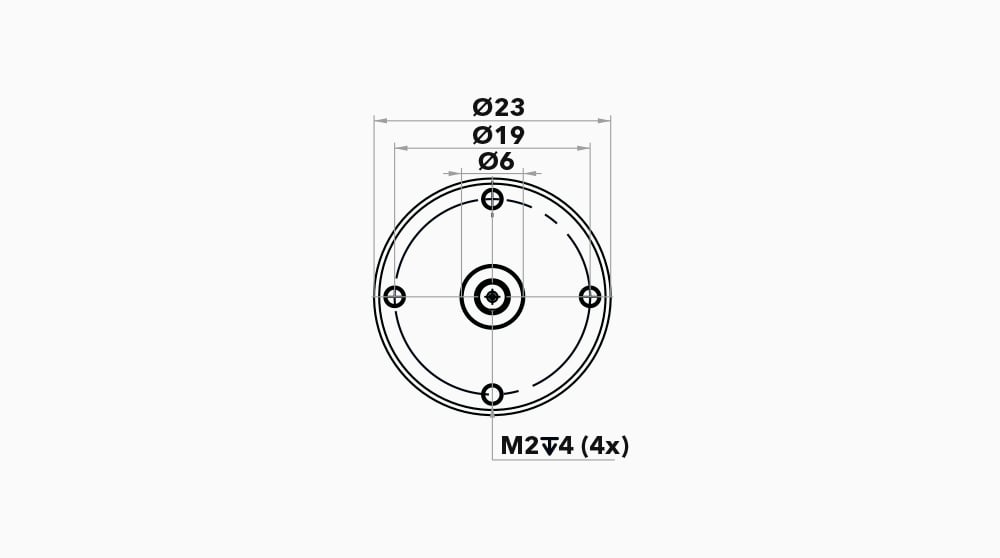
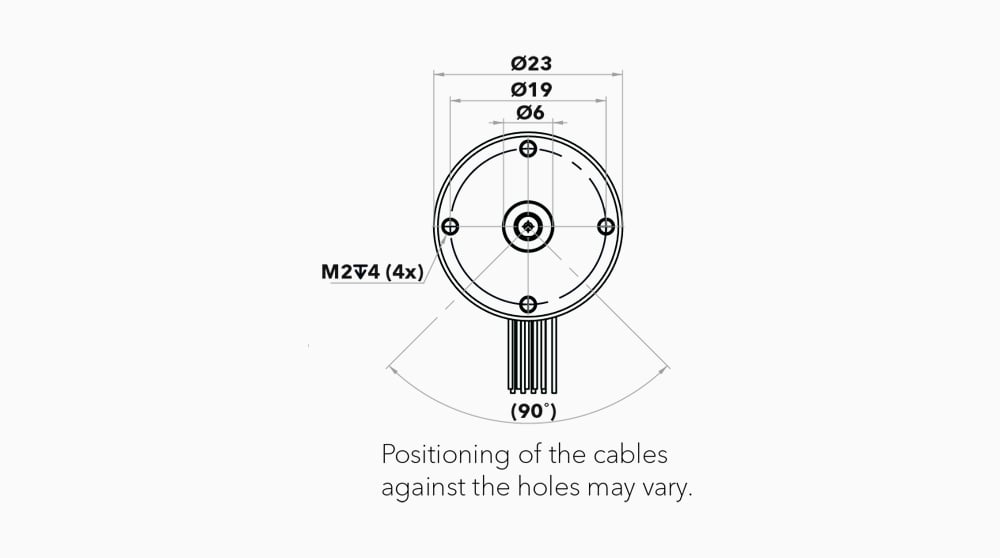
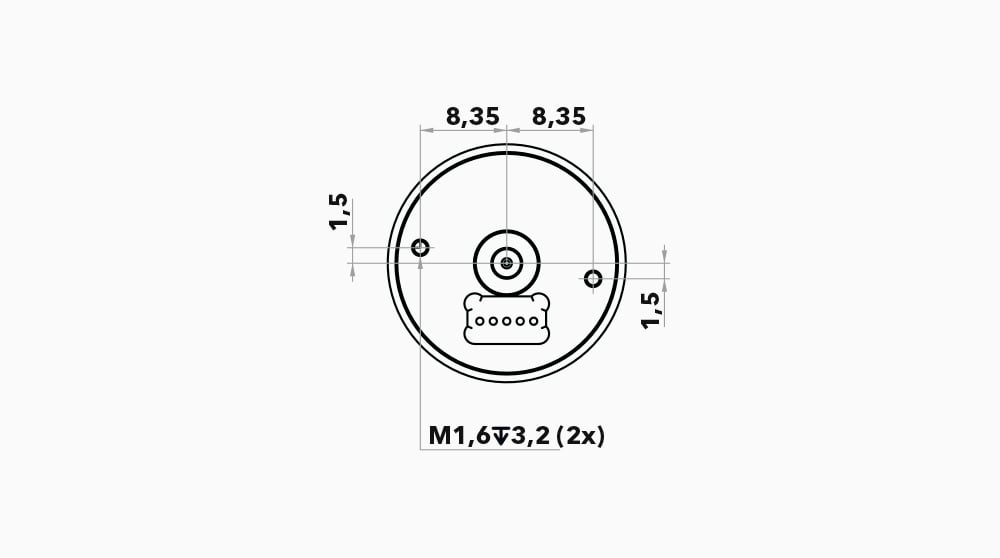
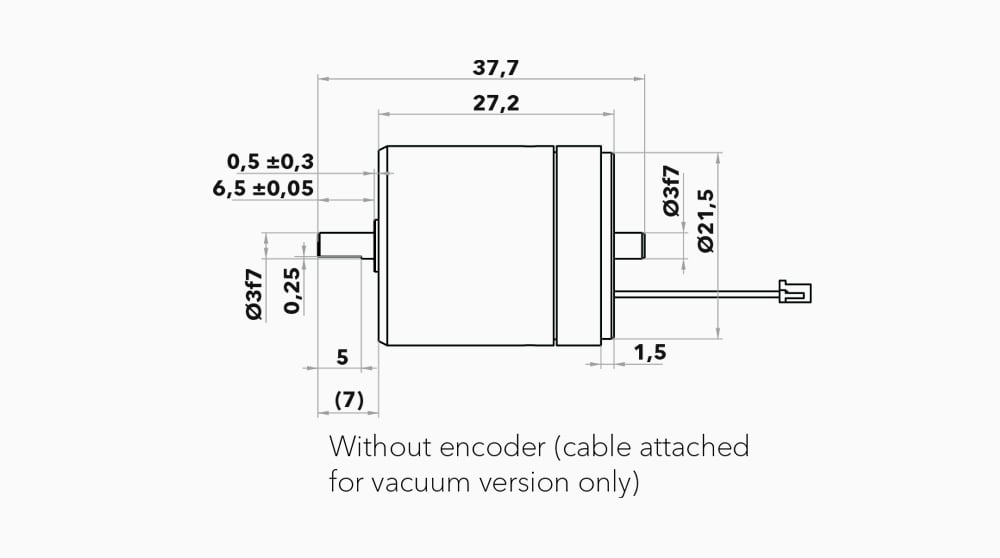
主要寸法 LR23-80
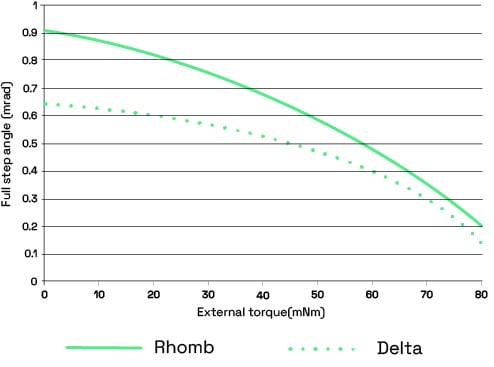
モーター性能
Rhomb波形(実線)とDelta波形(点線)によるモーター特性。フルステップ長とは、脚が1フルステップ(すなわち波形1サイクル)したときのドライブロッドの平均移動距離。
注:標準偏差σは0.5μmを考慮する必要がある。
標準的な値は20℃での値である。
無負荷時モーター回転数
|
波形
|
最大周波数 (Hz)
|
速度範囲 (mm/s)
|
|
Delta
|
3000
|
0~19rpm(0~114°/秒)
|
|
Rhomb |
0-27 rpm (0-160°/s)
|

モーターの制御
当社のモーター制御ユニットには、実験室用やOEM機器への組み込み用など、さまざまなタイプのコントローラやアンプを備えたモデルが多数用意されています。
また、独自のドライバー用電子機器を自社で開発したいお客様には、ドライバーのライセンス供与も可能です。

スターターキット
当社のスターターキットは、評価を簡素化し開発を加速するよう設計されています。複数の構成で提供され、選択したモータープラットフォームのテストと統合を開始するために必要なすべてを提供します。
各キットには、モーターを評価するために必要な部品が含まれています。
