Open-Loop vs Closed-Loop Systems in Precision Motion Control
In motion control engineering, the distinction between open-loop and closed-loop systems is fundamental—especially when high accuracy and repeatability are required. But what exactly defines these two control methods, and how do they impact the performance of your positioning system?
Understanding the Difference
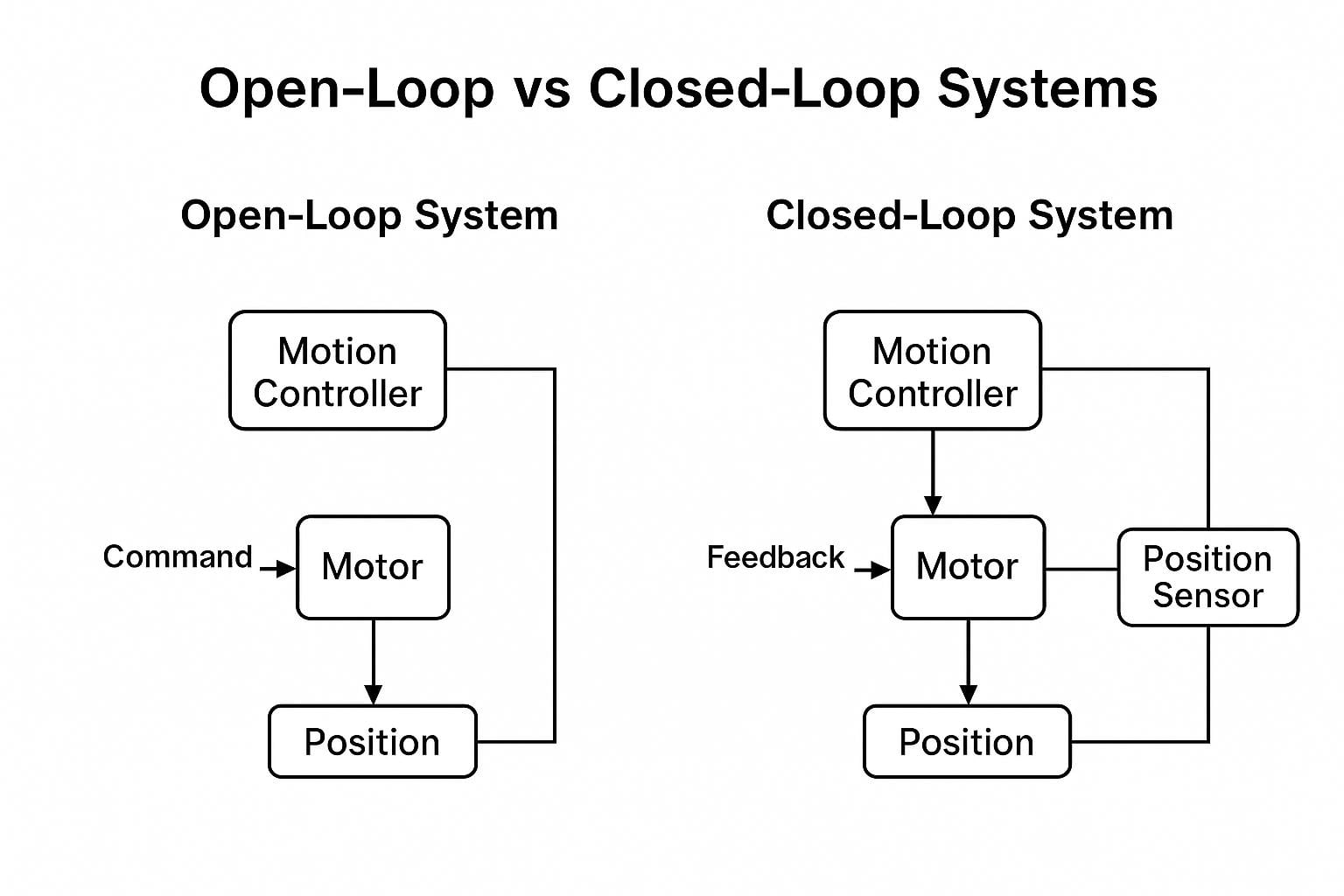
In an open-loop system, motion commands are executed without any feedback on the actual position of the moving component. That means the system operates blindly—it assumes movement occurs based on time, steps, or cycles, but there is no verification. These systems can still achieve good repeatability under controlled conditions, but without feedback, accuracy can drift over time or under load.
By contrast, a closed-loop system continuously monitors the position using real-time sensor data. This feedback is processed by the motion controller to adjust movement on the fly—ensuring that the target position is reached with a high level of certainty. Closed-loop control is essential in applications where nanometer-level precision, stability, or dynamic correction is required.
When is Open-Loop Control Sufficient?
Open-loop control can be cost-effective and compact—ideal for systems that always move between fixed end positions. For example, if a piezo motor drives a stage between two mechanical stops, and precision isn’t mission-critical, open-loop might suffice. In some systems, motion is estimated by counting pulses, cycles, or timing the motor actuation. However, since these methods lack confirmation, even small disturbances—like load variation or thermal expansion—can lead to error accumulation.
Why Closed-Loop Systems Excel in Precision Applications
In closed-loop systems, a position encoder—optical, magnetic, or inductive—feeds back real-time data to the controller, allowing dynamic compensation during motion. This allows the system to decelerate accurately as it nears the target, improving both positioning accuracy and system stability.
Closed-loop feedback can be integrated within the motion component (e.g., embedded encoders in linear stages) or sourced externally, such as a downstream device reporting actual position back to the controller. Both setups qualify as closed-loop, as long as feedback is being processed and corrections are made accordingly.
Sensor Types in Closed-Loop Motion Control
There are two primary categories of encoders:
- Incremental Encoders: These measure position changes relative to a reference point. They’re compact and widely used in high-resolution applications. However, they require an initial zeroing routine and are susceptible to losing track if powered down during motion.
- Absolute Encoders: Each position has a unique digital signature, providing absolute position awareness at all times—even after a power cycle. While more robust, these sensors tend to be bulkier and more expensive, making them less practical for compact micro-actuators.
At Acuvi, our closed-loop systems are engineered for demanding applications where precision, repeatability, and stability are non-negotiable. By integrating high-resolution encoders with our piezoelectric actuators and motion stages, we deliver responsive, space-efficient solutions for life science, optics, and semiconductor industries.