精密运动控制中的开环系统与闭环系统
在运动控制工程中,开环 系统和闭环系统之间的区别至关重要,尤其是在要求高精度和高重复性的情况下。但是,这两种控制方法的定义究竟是什么,它们对定位系统的性能又有何影响?
了解区别
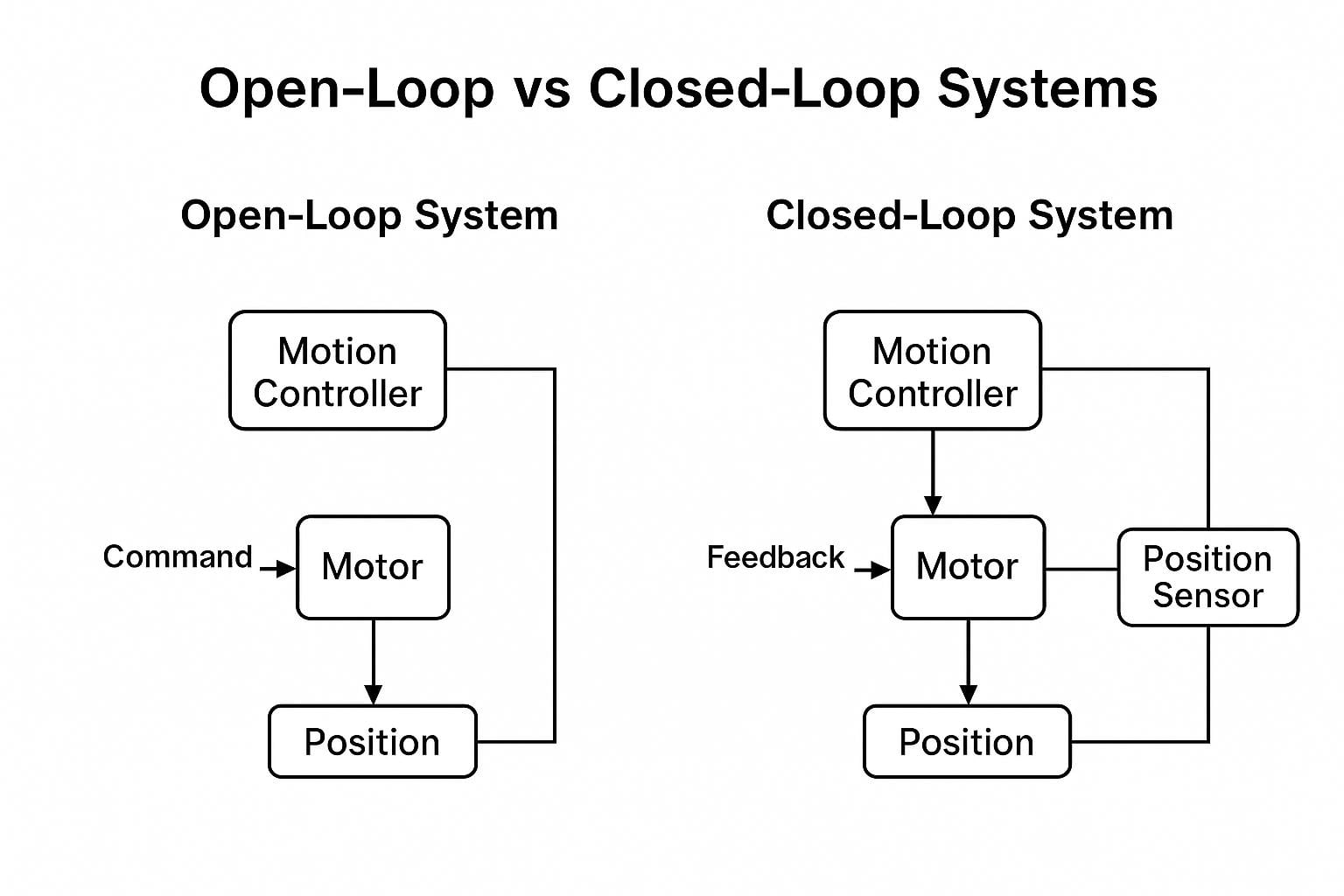
在开环系统中,运动指令的执行不需要对运动部件的实际位置进行任何反馈。这意味着系统是盲目运行的,它假定运动是根据时间、步数或周期进行的,但没有验证。在受控条件下,这些系统仍可实现良好的可重复性,但由于没有反馈,精度会随时间或负载的变化而偏移。
相比之下,闭环系统利用实时传感器数据持续监控位置。运动控制器会处理这些反馈信息,以便即时调整运动,确保高度准确地达到目标位置。在需要纳米级精度、稳定性或动态校正的应用中,闭环控制是必不可少的。
开环控制何时足够?
开环控制具有成本低、结构紧凑的优点,非常适合总是在固定端点之间移动的系统。例如,如果压电电机驱动平台在两个机械止点之间移动,并且精度不是关键任务,那么开环控制就足够了。在某些系统中,运动是通过计数脉冲、周期或电机驱动计时来估算的。然而,由于这些方法缺乏确认,即使是很小的干扰,如负载变化或热膨胀,也会导致误差累积。
为什么闭环系统在精密应用中表现出色
在闭环系统中,位置编码器(光学、磁性或感应式)会将实时数据反馈给控制器,以便在运动过程中进行动态补偿。这样,系统在接近目标时就能准确减速,从而提高定位精度和系统稳定性。
闭环反馈可以集成在运动部件中(例如线性平台中的嵌入式编码器),也可以来自外部,例如下游设备将实际位置反馈给控制器。只要正在处理反馈并做出相应修正,这两种设置都属于闭环。
闭环运动控制中的传感器类型
编码器主要分为两类:
- 增量式编码器:这些编码器可测量相对于参考点的位置变化。它们结构紧凑,广泛用于高分辨率应用。不过,它们需要初始归零程序,并且在运动过程中断电时容易丢失轨迹。
- 绝对式编码器:每个位置都有独特的数字签名,可随时提供绝对位置感知,即使在电源循环后也是如此。这些传感器虽然更加坚固耐用,但往往体积更大、价格更贵,因此对于紧凑型微型执行器来说不太实用。
在 Acuvi,我们的闭环系统专为精度、可重复性和稳定性要求极高的应用而设计。通过将高分辨率编码器与我们的压电致动器和运动平台相集成,我们为生命科学、光学和半导体行业提供了反应灵敏、节省空间的解决方案。