精密モーションコントロールにおけるオープンループとクローズドループの比較
モーション・コントロール・エンジニアリングにおいて、オープン・ループと クローズド・ループ・システムの区別は、特に高精度と繰返し精度が要求される場合には基本的なことです。しかし、この2つの制御方法は一体何を定義し、位置決めシステムの性能にどのような影響を与えるのでしょうか?
違いを理解する
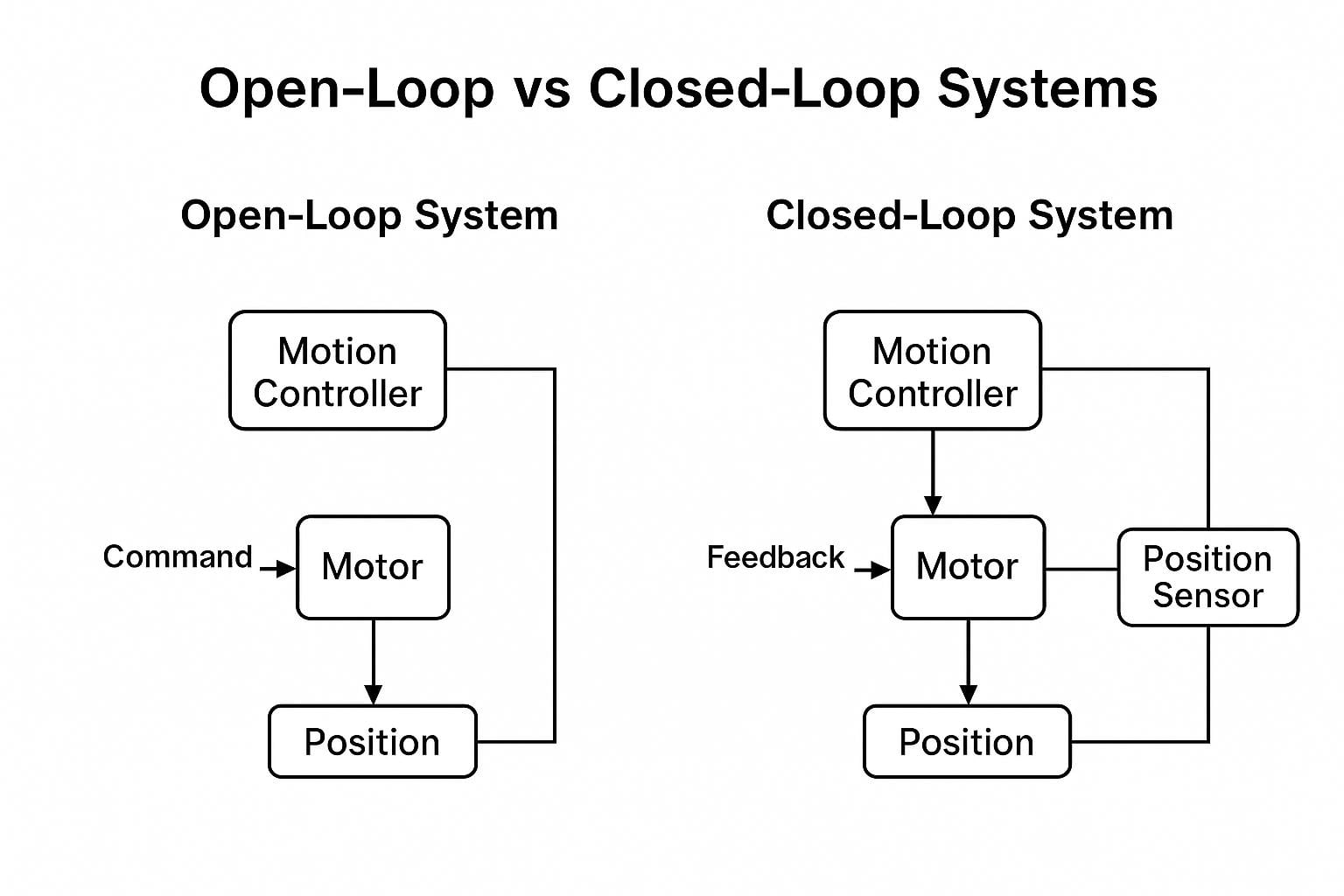
オープンループシステムでは、モーションコマンドは、移動コンポーネントの実際の位置に関するフィードバックなしで実行される。つまり、システムは盲目的に動作し、時間、ステップ、またはサイクルに基づいて動きが発生すると仮定しますが、検証はありません。このようなシステムでも、制御された条件下では良好な繰返し精度を達成できますが、フィードバックがないため、時間や負荷がかかると精度が低下します。
対照的に、クローズドループシステムは、リアルタイムのセンサーデータを使用して位置を継続的に監視します。このフィードバックはモーション・コントローラーで処理され、その場で動きを調整することで、目標位置に確実に到達します。クローズドループ制御は、ナノメートルレベルの精度、安定性、動的補正が必要なアプリケーションでは不可欠です。
どのような場合にオープンループ制御で十分なのか?
オープンループ制御は、常に固定された終端位置の間を移動するシステムにとって理想的なコスト効率とコンパクトさを実現できます。例えば、ピエゾモータが2つのメカニカルストップ間でステージを駆動し、精度がミッションクリティカルでない場合、オープンループで十分かもしれません。一部のシステムでは、パルスやサイクルをカウントしたり、モーター作動のタイミングを計ったりすることで動きを推定します。しかし、これらの方法では確認ができないため、負荷変動や熱膨張のような小さな外乱でも誤差の蓄積につながります。
クローズド・ループ・システムが高精度のアプリケーションで威力を発揮する理由
クローズドループシステムでは、位置エンコーダ(光学式、磁気式、誘導式)がリアルタイムデータをコントローラにフィードバックし、動作中の動的補正を可能にする。これにより、システムは目標に近づくにつれて正確に減速し、位置決め精度とシステムの安定性の両方を向上させることができます。
クローズドループフィードバックは、モーションコンポーネント内に組 み込まれることも(例えば、リニアステージの埋め込みエンコーダ)、または 実際の位置をコントローラに報告する下流のデバイスのように外部から供給 されることもあります。フィードバックが処理され、それに応じて修正が行なわれる限り、どちらのセットアップもクローズドループとして適格です。
閉ループモーション制御におけるセンサーの種類
エンコーダーには主に2つのカテゴリーがある:
- インクリメンタルエンコーダ:基準点からの相対的な位置変化を測定します。コンパクトで、高分解能のアプリケーションに広く使用されている。しかし、初期ゼロ設定ルーチンが必要で、動作中に電源が切れると追跡できなくなる可能性があります。
- アブソリュート・エンコーダ:各位置には固有のデジタル署名があり、電源サイクル後でも常に絶対位置を認識できます。より堅牢ですが、これらのセンサーはかさばり、高価になる傾向があり、コンパクトなマイクロアクチュエーターには実用的ではありません。
Acuvi、精密性、再現性、安定性が絶対条件となる厳しい用途向けに、クローズドループシステムを設計しています。高解像度エンコーダを当社の圧電アクチュエータおよびモーションステージと統合することで、ライフサイエンス、光学、半導体産業向けに、応答性に優れ、省スペースなソリューションを提供します。