정밀 모션 제어의 개방형 루프와 폐쇄형 루프 시스템 비교
모션 제어 엔지니어링에서 개방형 루프 시스템과 폐쇄형 루프 시스템의 구분은 특히 높은 정확도와 반복성이 요구되는 경우에 필수적입니다. 하지만 이 두 가지 제어 방법을 정확히 정의하는 것은 무엇이며, 포지셔닝 시스템의 성능에 어떤 영향을 미칠까요?
차이점 이해하기
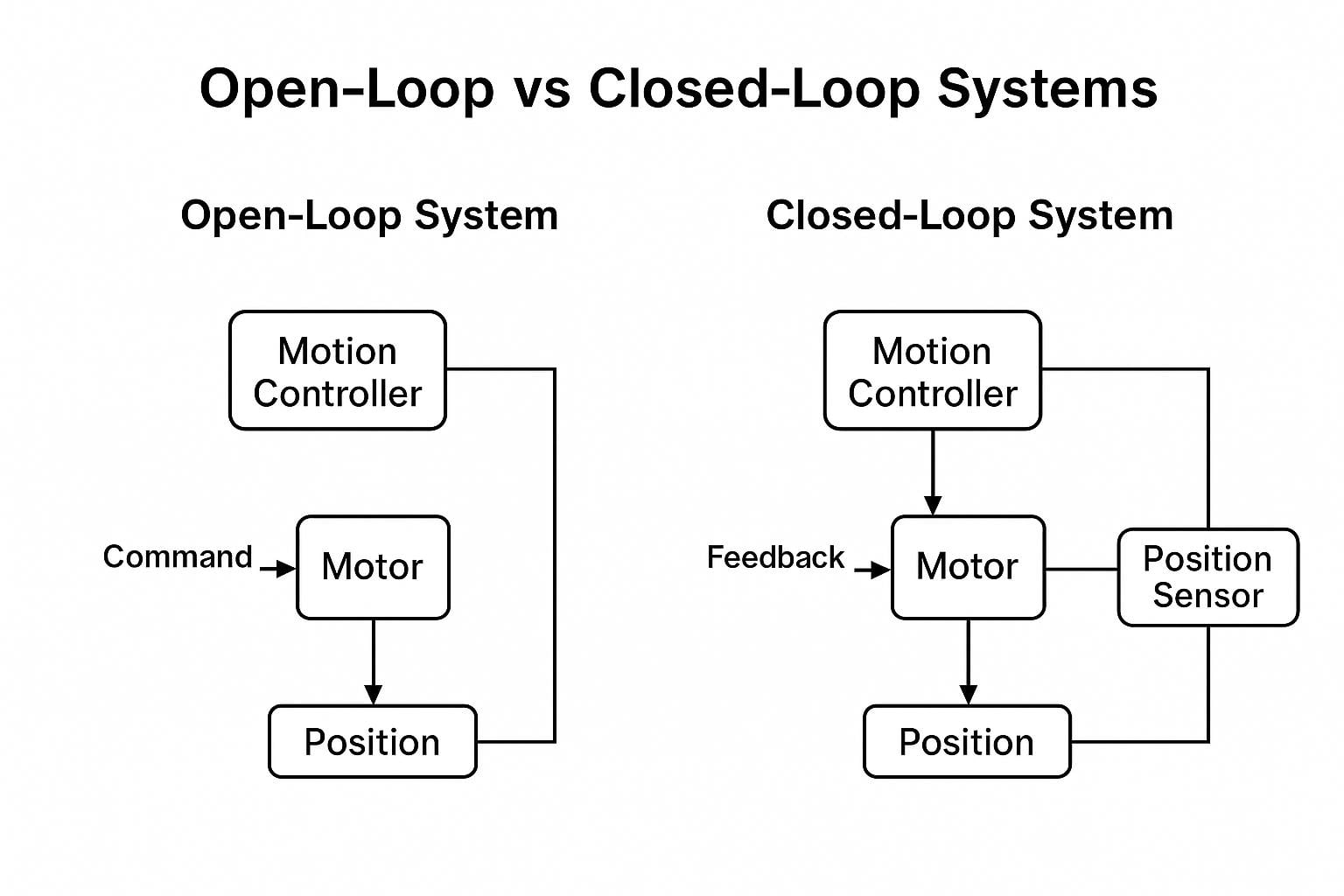
오픈 루프 시스템에서는 움직이는 구성 요소의 실제 위치에 대한 피드백 없이 모션 명령이 실행됩니다. 즉, 시스템이 시간, 단계 또는 주기에 따라 움직임이 발생한다고 가정하고 맹목적으로 작동하지만 검증이 없습니다. 이러한 시스템은 제어된 조건에서는 여전히 우수한 반복성을 달성할 수 있지만 피드백이 없으면 시간이 지나거나 부하가 걸리면 정확도가 떨어질 수 있습니다.
반면 폐쇄 루프 시스템은 실시간 센서 데이터를 사용하여 위치를 지속적으로 모니터링합니다. 모션 컨트롤러는 이 피드백을 처리하여 즉시 움직임을 조정함으로써 높은 수준의 확실성으로 목표 위치에 도달할 수 있도록 합니다. 폐쇄 루프 제어는 나노미터 수준의 정밀도, 안정성 또는 동적 보정이 필요한 애플리케이션에서 필수적입니다.
오픈 루프 제어는 언제 충분할까요?
오픈 루프 제어는 비용 효율적이고 컴팩트할 수 있어 항상 고정된 끝 위치 사이를 이동하는 시스템에 이상적입니다. 예를 들어 피에조 모터가 두 개의 기계식 스톱 사이에서 스테이지를 구동하고 정밀도가 미션 크리티컬하지 않은 경우 오픈 루프로 충분할 수 있습니다. 일부 시스템에서는 펄스, 사이클을 세거나 모터 작동 타이밍을 측정하여 동작을 추정하기도 합니다. 그러나 이러한 방법은 확인이 부족하기 때문에 부하 변화나 열팽창과 같은 작은 교란에도 오류가 누적될 수 있습니다.
정밀 애플리케이션에서 폐쇄 루프 시스템이 탁월한 이유
폐쇄 루프 시스템에서는 광학, 자기 또는 유도식 위치 인코더가 실시간 데이터를 컨트롤러에 피드백하여 동작 중 동적 보정을 가능하게 합니다. 이를 통해 시스템이 목표물에 가까워질수록 정확하게 감속할 수 있어 위치 정확도와 시스템 안정성이 모두 향상됩니다.
폐쇄 루프 피드백은 모션 컴포넌트(예: 리니어 스테이지의 임베디드 인코더)에 통합하거나 실제 위치를 컨트롤러에 다시 보고하는 다운스트림 장치와 같이 외부에서 소싱할 수 있습니다. 피드백이 처리되고 그에 따라 수정이 이루어진다면 두 설정 모두 폐쇄 루프에 해당합니다.
폐쇄 루프 모션 제어의 센서 유형
인코더에는 크게 두 가지 범주가 있습니다:
- 인크리멘탈 인코더: 기준점을 기준으로 위치 변화를 측정합니다. 크기가 작고 고해상도 애플리케이션에 널리 사용됩니다. 하지만 초기 제로화 루틴이 필요하고 동작 중에 전원이 꺼지면 트래킹이 손실되기 쉽습니다.
- 앱솔루트 인코더: 각 위치에는 고유한 디지털 서명이 있어 전원이 꺼진 후에도 항상 절대 위치를 인식할 수 있습니다. 이 센서는 더 견고하지만 부피가 크고 가격이 비싸기 때문에 소형 마이크로 액추에이터에는 실용성이 떨어집니다.
Acuvi의 폐쇄 루프 시스템은 정밀도, 반복성 및 안정성이 타협할 수 없는 까다로운 애플리케이션을 위해 설계되었습니다. 고해상도 엔코더와 압전 액추에이터 및 모션 스테이지를 통합하여 생명 과학, 광학 및 반도체 산업을 위한 반응성이 뛰어나고 공간 효율적인 솔루션을 제공합니다.