Controlling the motor
Our motor control units come in many different versions, with controllers and amplifiers for laboratory use as well as for integration into OEM devices.
We can also license the drivers for customers that want to build their own driver electronics.
Closed or open loop controller with sub-nanometer resolution
- 8192 microsteps
- Multi-axis control
- Stackable
- Easily integrated
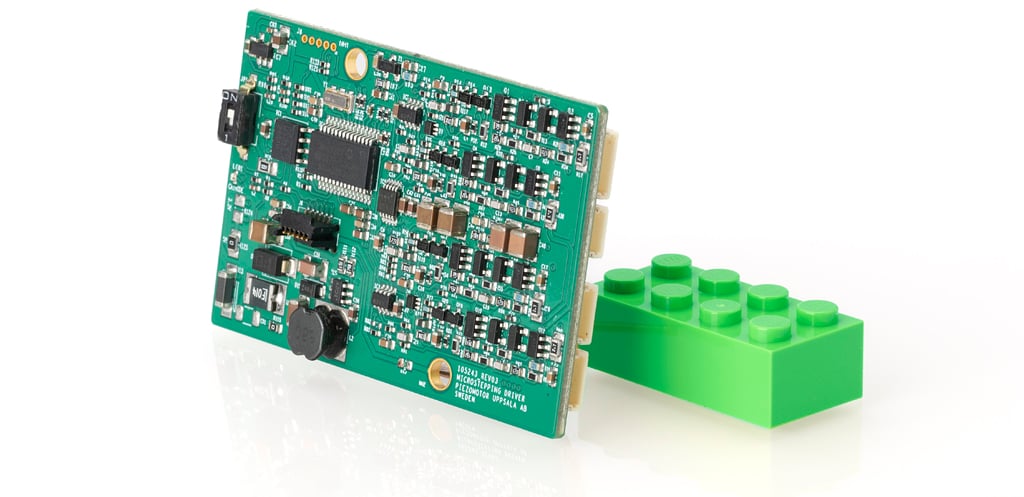
Piezo LEGS® Controller PMD401
The PMD401 controller is primarily intended for use with our standard range of piezo motors up to 40N and our rotary piezo motors.
The PMD401 is a fully featured miniature controller for open loop and closed loop operation that can be easily stacked to form a multi-axis controller system. It can be connected to the customer’s mainboard for integration in OEM applications. Host communication is done via 2-wire RS485 through ASCII commands.
The PMD401 can also be used as a servo amplifier where the external controller regulates the speed via an SPI interface. A breakout board with terminal blocks for easy access to power and communication is offered optionally for customers who want to get application development started straight away. It provides sub-nanometer resolution and speed in the mm/s range.
Specifications Piezo LEGS® PMD401
| Type | Value | Note |
| Number of axes | 1 | |
| Multi axes support | Yes | Units can be RS485-chained for multi-axis |
| True speed control | No | Only stepping rate controlled |
| Resolution | 8192 microsteps | Each full step of about 5 µm is divided into 8192 steps |
| Maximum stepping rate (Full step frequency – Hz) | 1500 | Depends on motor |
| Supported encoders | Quadrature | ABZ, 20 MHz counting |
| SSI | SSI 8–30 bits, 330 or 130 kbps | |
| BiSS | 18/26/32 bits, 330 kbps | |
| Host communication | Two-wire RS485 | Commands are sent in ASCII format, 115.2 kbps (n81) |
| Servo interface | SPI | 16 bits (signed), max 15 Mbps |
| General I/O | 4 in | Depending on encoder type and use of limit switches |
| 3 out | ||
| Stacking connector | 6-pole, ERNI MicroStac 114711 | GND, 48 V, RS485 |
| Motor connector | 5-pole, JST SM05B-SRSS-TB | Two connectors, parallel connection |
| Encoder/servo connector | 6-pole, JST SM06B-SRSS-TB | Input for sensors or SPI servo interface |
| Limit switch | Yes | Input for external limit switches |
| Communication connector | 3-pole, JST SM03B-SRSS-TB | Input for RS485, or use stacking connector |
| Power connector | 2-pole, JST SM02B-SRSS-TB | input for 48 V supply, or use stacking connector |
| Power supply | 48 V DC, 5 W | 48 V DC ±5% |
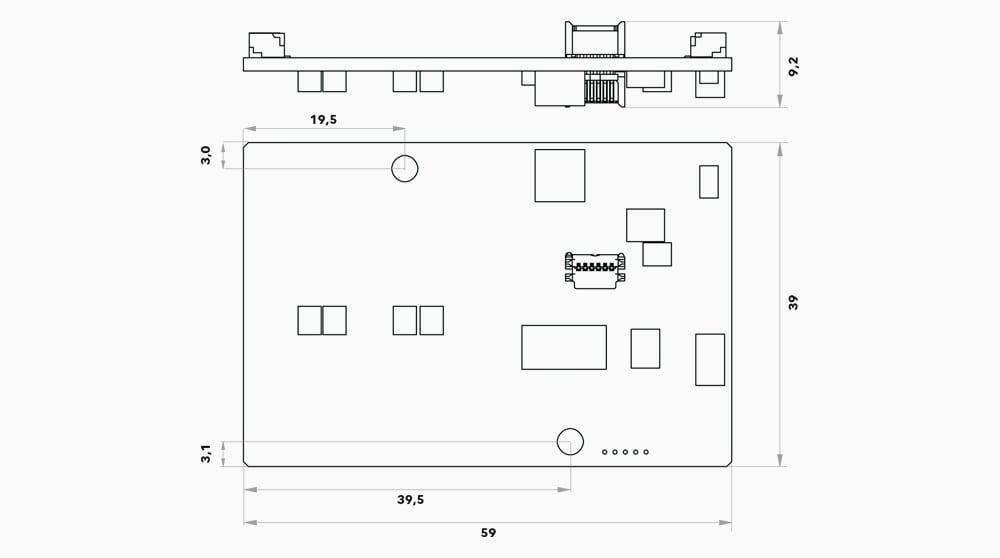
| Dimensions | 59 x 39 x 9.2 | mm |