压电效应
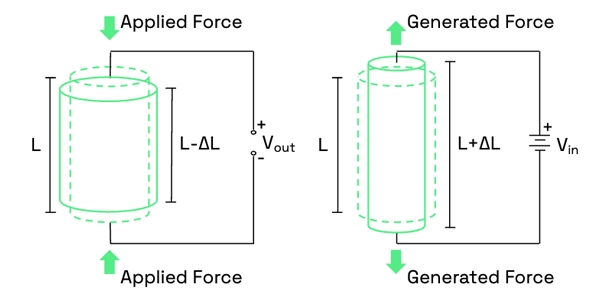
1880 年,雅克和皮埃尔-居里发现,压力会在石英和电气石等几种晶体中产生电荷;他们称这种现象为压电效应。piezo 一词源于希腊语,意为压力。后来,他们注意到电场可以使压电材料变形。这种效应被称为逆压电效应。
压电 LEGS® 技术
高精度
PiezoLEGS 可以毫无问题地在亚微米级甚至亚纳米级范围内定位。PiezoLEGS 的分辨率取决于所使用的电子设备;电机本身并不是限制因素。PiezoLEGS 能够在亚纳米级 上 进行微步定位,从而实现真正的平滑运动。
无反冲
无需齿轮箱或滚珠丝杠,即可实现无间隙的受控直线运动,因为电机会立即做出响应。这种真正的直接驱动实现了高精度和动态速度范围的结合。PiezoLEGS 具有自锁功能,即使断电也能保持负载。
通过向压电材料施加电压,可以使其形状发生变化。PiezoLEGS 陶瓷致动器的巧妙设计允许每个电机 "腿 "拉长或侧向弯曲。通过正确的驱动信号,可以使每对四条腿(或六条腿)同步运动,从而实现类似动物的行走运动--一步一步地行走,并能在任何精确的时刻停止。腿和驱动杆之间的直接摩擦耦合确保 Piezo LEGS® 在运行时没有任何反向间隙或机械间隙。此外,直接驱动装置还能在不消耗任何电能的情况下提供全力锁定和断电锁定功能。
非磁性的
PiezoLEGS 执行器单元是非磁性的,因此可以设计出适用于高磁性环境或磁干扰问题的电机。
与直流电机不同,PiezoLEGS 电机没有绕组,因此不会产生磁通。由于不锈钢是标准的外壳材料,铁氧体自然会干扰外部磁场,因此可提供非磁性电机。这些电机的外壳和其他部件由非磁性合金制成,即使在核磁共振成像机内使用也不会干扰成像过程。
非磁性电机在距离电机外壳 10 毫米处的磁通密度小于 1 纳特斯拉(参考测量中的传感器灵敏度)。
紧凑型设计
电机设计紧凑,非常适合 OEM 应用。
Acuvi 利用 PiezoLEGS 的独特功能,制造出直接驱动的高精度致动器。与需要齿轮或机械传动的传统解决方案不同,PiezoLEGS 无需这些组件。这就实现了纳米甚至亚纳米分辨率的无间隙线性运动。与传统解决方案相比,零件数量的减少也导致电机尺寸的显著缩小。此外,简单的驱动电子元件也进一步节省了空间,实现了由 PiezoLEGS 执行器驱动的任何应用的小型化。
使用 Acuvi 的微型 PiezoLEGS 执行器,除了能提高分辨率和瞬时响应外,还能带来许多优势。值得注意的是,这些致动器可消除设备静止时的反向间隙和功耗。
除了降低复杂性和减小电机尺寸外,微型化还要求制造商缩小尺寸。例如,集成电路的缩小更加强调光刻工艺的精度。PiezoLEGS 电机可提高精度,从而使新一代集成电路在提供卓越性能的同时更加紧凑。正如 Acuvi 的产品一样,半导体行业也处于创新的最前沿。
系统
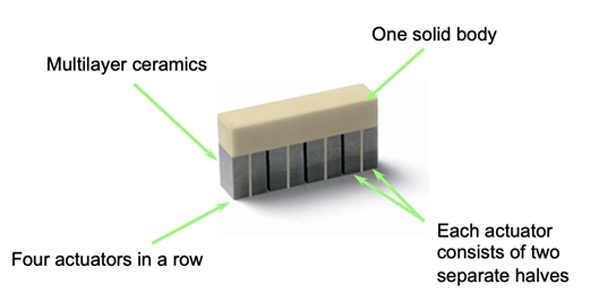
要操作压电电机,就需要驱动电子元件,这在所有现代运动控制系统中都是必不可少的。电机的核心是多层压电陶瓷,这种元件即使在低电压下也能发挥卓越性能。通过对陶瓷施加精确控制的电压,可产生线性或旋转运动。
为了保持对位置的控制,需要使用编码器。系统的分辨率由编码器分辨率和电子设备分辨率决定。
基于压电技术的系统的最大优势之一是能够在不增加系统成本的情况下实现高精度和快速响应时间。
基于压电电机的系统采用真正的直接驱动机制,需要移动的物体通过驱动杆直接连接到致动器内的压电陶瓷电机支腿。这种设计具有明显的优势,包括无反向间隙、快速响应时间和高分辨率。因此,在重复移动和安放应用中,它可以缩短周期时间,从而减少整体处理时间。

致动器
PiezoLEGS® 采用摩擦驱动方式,通过压电陶瓷电机支腿与转子或驱动杆直接接触的内部预紧力产生力。因此,在整个行走过程中,支腿与驱动杆保持机械连接。
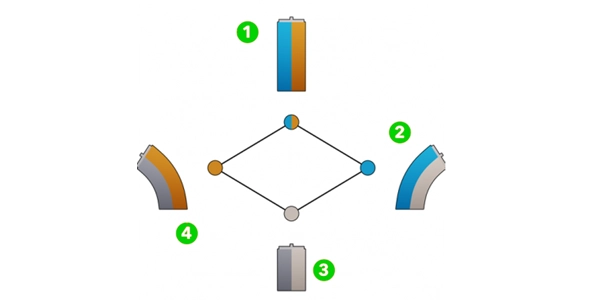
1.向左右两侧施加电压,使腿部伸到最长
2.对腿的左侧部分施加电压,使腿向右侧伸展
3. 对腿不施加电压 4.腿部无电压
4.对腿的右侧部分施加电压,使腿向左侧伸展
在这里,您可以看到这一系列动作:
电子设备
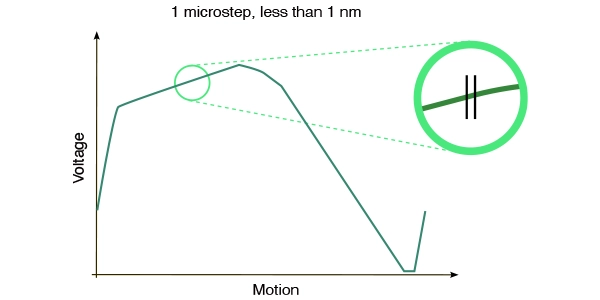
通过向陶瓷脚施加电压信号,可产生受控运动。u1和u2 各有一个。如下图所示,有两种波形。如下图所示,步长因负载而异。一个阶跃可分为数千个微阶跃,微阶跃的长度可达亚纳米级。
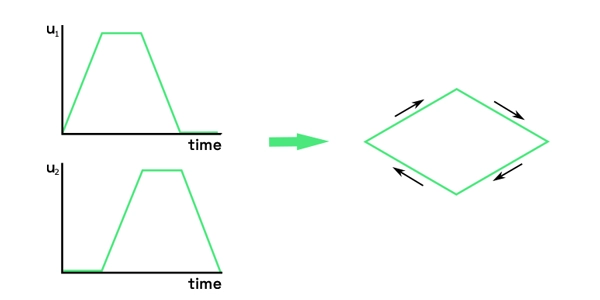
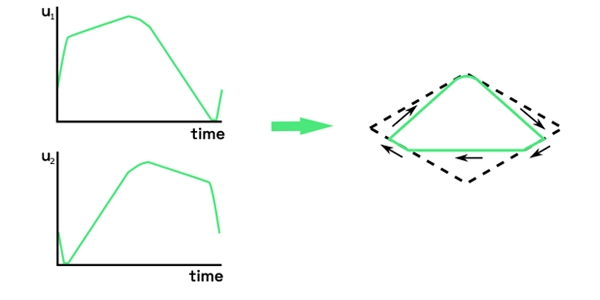
为实现高微步分辨率而优化的波形
微步 = 波形(全步)的一部分;例如,每个波形 8192 微步。