圧電効果
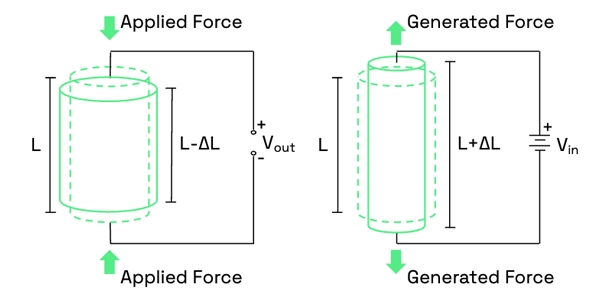
1880年、ジャック・キュリーとピエール・キュリーは、石英やトルマリンなどの結晶に圧力が加わると電荷が発生することを発見した。この現象を圧電効果と呼んだ。圧電の語源はギリシャ語の圧力である。その後、彼らは電界が圧電材料を変形させることに気づいた。この効果は逆圧電効果と呼ばれている。
Piezo LEGS®
高精度
PiezoLEGSはサブミクロンレベル、あるいはサブナノメートルの範囲まで問題なく位置決めすることができます。PiezoLEGSの分解能は使用する電子機器に依存し、モーター自体が制限要因ではありません。サブナノメートル( ) レベルまでマイクロステップする能力により、PiezoLEGSは真に滑らかな動きを実現することができます。
バックラッシュなし
モーターが瞬時に反応するため、ギアボックスやボールねじが不要で、バックラッシュのない制御されたリニアモーションが実現します。この真のダイレクトドライブは、高精度とダイナミックな速度範囲の組み合わせを可能にします。ピエゾレッグスはセルフロック式で、電源を切っても負荷を保持できます。
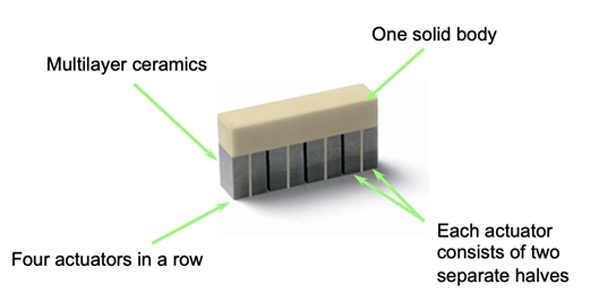
圧電材料に電圧を印加することで、その形状変化を誘起できます。PiezoLEGS® セラミックアクチュエータの独創的な設計により、各モーター「脚」は伸長または横方向に曲げられます。適切な駆動信号を用いれば、4本(または6本)の脚のペアごとの動きを同期させることが可能で、動物のような歩行動作を実現します。一歩一歩の動作が、任意の正確な瞬間に停止できる能力を備えています。 脚部と駆動ロッド間の直接摩擦結合により、Piezo LEGS® バックラッシュや機械的遊びを一切伴わずにPiezo LEGS® 。さらに、この直接駆動方式は完全な推力提供し、電源オフ時のロック機能も消費電力ゼロで実現します。
非磁性
ピエゾレッグスアクチュエーターユニットは非磁性であるため、高磁性環境や磁気障害が懸念される状況に適したモーターを設計することができます。
ピエゾレッグスモーターはDCモーターと異なり、巻線がないため磁束が発生しません。標準的なハウジング材料であるステンレス鋼は当然フェライトであり、外部磁界を妨害するため、非磁性モーターが利用可能である。これらのモーターは、ハウジングやその他の部品が非磁性合金で作られているため、MRI装置内でも画像処理を妨げることなく使用することができます。
非磁性モーターの磁束密度は、モーターハウジングから10mmの距離で1ナノテスラ(基準測定におけるセンサー感度)未満である。
コンパクトなデザイン
コンパクトな設計のモーターはOEM用途に最適です。
Acuvi PiezoLEGSの独自機能Acuvi 、ダイレクトドライブ方式の高精度アクチュエータを実現します。従来のギアや機械式伝動機構を必要とするソリューションとは異なり、PiezoLEGSではこれらの部品が不要となります。これによりバックラッシュのない直線運動が実現され、ナノメートル単位、さらにはサブナノメートル単位の分解能を達成します。 部品点数の削減により、従来ソリューションと比較してモーターサイズも大幅に縮小されます。さらに、シンプルな駆動電子回路がさらなる省スペース化に寄与し、PiezoLEGSアクチュエータで駆動されるあらゆるアプリケーションの小型化を実現します。
Acuvi アクチュエータを使用することで、分解能の向上や瞬時応答性に加え、数多くの利点がAcuvi 。特に注目すべきは、装置が静止状態にある際のバックラッシュと消費電力が排除される点です。
小型化は、複雑性の低減やモーターの寸法縮小に加え、製造業者にとってのサイズ縮小も意味します。例えば、集積回路の微細化は、リソグラフィ工程における精度の重要性をさらに高めます。ピエゾレッグスモーターは精度を飛躍的に向上させるため、次世代集積回路は優れた性能を維持しながら、さらにコンパクト化が実現されます。半導体産業は、Acuvi製品と同様に、革新の最前線に立っています。
当社ではさまざまな標準モーターを提供していますが、基礎となる技術は高度にカスタマイズ可能です。専門的なアドバイスが必要な場合は、当社の知識豊富なエンジニアリング・チームに遠慮なくお問い合わせください。
システム
ピエゾモーターを動作させるには、現代のモーション制御システムに不可欠な駆動電子回路が必要です。モーターの心臓部は多層ピエゾセラミックであり、低電圧レベルでも卓越した性能を発揮することで知られています。セラミックに精密に制御された電圧を印加することで、直線ロータリー またはロータリー 生成されます。
位置制御を維持するにはエンコーダーが必要です。 システムの分解能はエンコーダの分解能と電子回路の分解能によって決定されます。
ピエゾベースシステムの最大の利点の一つは、システムコストの増加を伴わずに高精度と高速応答を実現できる点です。
圧電モーターベースのシステムは真のダイレクトドライブ機構を採用しており、駆動ロッドを介して移動対象物がアクチュエータ内の圧電セラミックモーター脚に直接接続される。この設計はバックラッシュの欠如、高速応答性、高分解能といった大きな利点を提供する。その結果、繰り返し動作・安定化アプリケーションにおいて短いサイクルタイムを実現し、全体の処理時間を短縮する。

アクチュエーター
PiezoLEGS®は摩擦駆動方式で動作し、ピエゾセラミックモーター脚部の内部予圧がローターまたは駆動ロッドと直接接触することで推力 。その結果、脚部は歩行動作中も常に駆動ロッドと機械的に連結された状態を維持する。
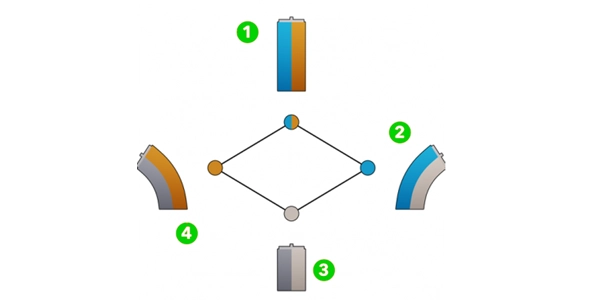
1.左右両方に電圧が印加され、脚が最大に伸びる
2.脚の左側に電圧をかけ、脚を右側に伸ばす
3.脚には電圧を印加しない
4.脚の右側に電圧をかけ、脚を左側に伸ばす
このシークエンスの動きをご覧いただきたい:
エレクトロニクス
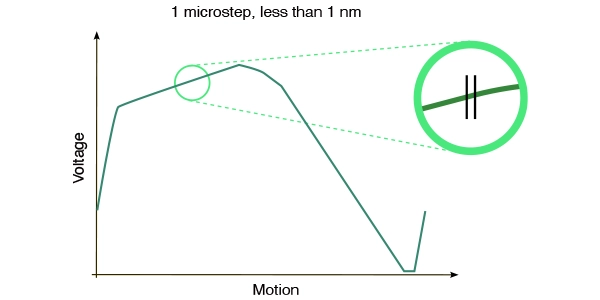
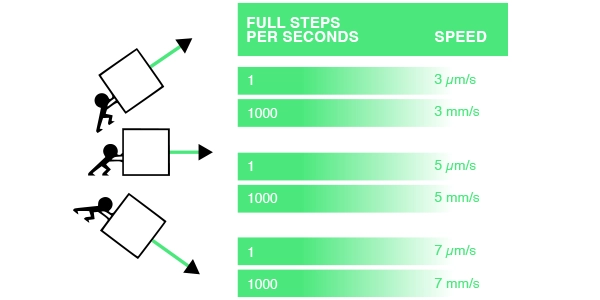
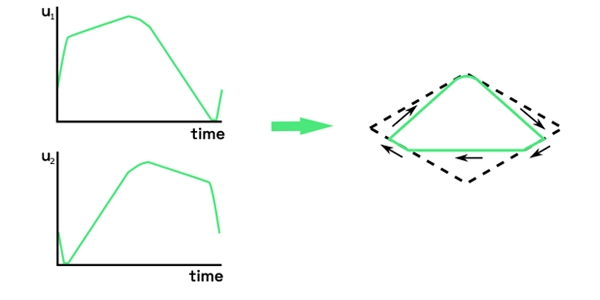
セラミックの脚に電圧信号を印加することで、制御された動きが生み出される。u1とu2の両側に1つずつ。波形には下図のように2つのバージョンがあります。ステップの長さは、下図のように負荷によって異なります。1つのステップは数千のマイクロ・ステップに分けることができ、マイクロ・ステップの長さはサブナノメーター・レベルに達することがあります。
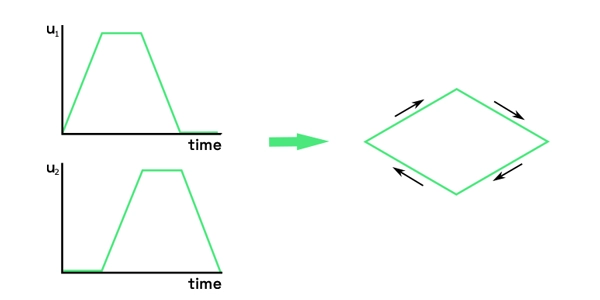
高マイクロ・ステップ分解能に最適化された波形
マイクロ・ステップ=波形(フル・ステップ)の数分の一
例えば、1波形あたり8192マイクロ・ステップ。