压电 LEGS 技术电机
Piezo LEGS® 采用摩擦驱动方式工作,通过压电陶瓷制动器支腿与转子或驱动杆的直接摩擦接触产生内部预紧力。当支腿开始行走时,它们始终与驱动杆保持机械接触。
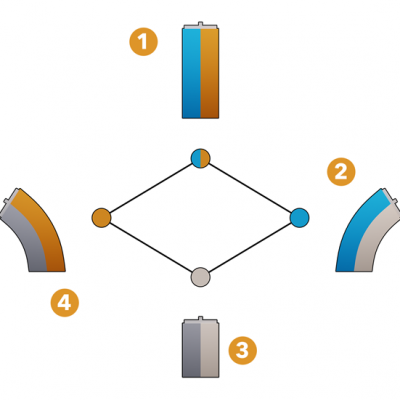
- 向左右两侧施加电压,使腿部伸到最长
- 向腿的左侧施加电压,使腿向右侧伸展
- 腿部无电压
- 向腿的右侧施加电压,使腿向左侧伸展
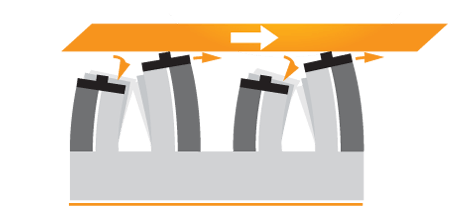
第一步
第一对支腿与杆保持接触并向右移动。第二对腿缩回。它们的尖端向左弯曲。
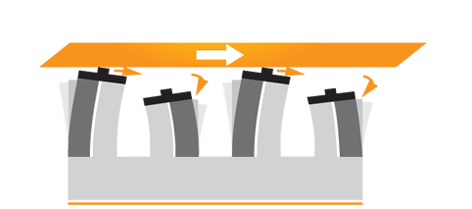
第二步
现在,第二对鱼竿开始伸展,并在鱼竿上重新定位。它们的尖端向右移动。第一对缩回,尖端向左弯曲。
第三步
第二对腿向右移动。第一对腿开始伸展,并向杆的方向移动。
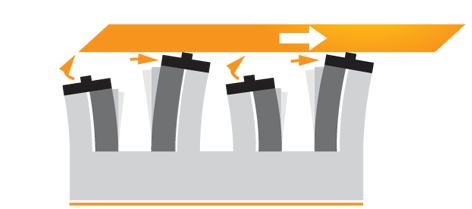
第四步
所有四条腿都是电动启动的。

电子设备
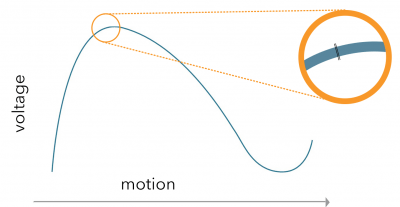
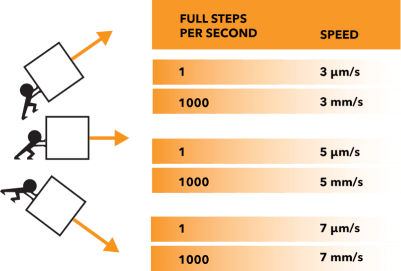
通过向陶瓷施加电压信号,可产生受控运动。如下图所示,步长取决于负载。一个完整的步长可分为数千个微步。微步的长度可达亚纳米级。
针对高微步分辨率进行了优化的波形
一个微步 = 波形(全步)的一部分;例如,每个波形 8192 个微步。