Piezo LEGS モーター
Piezo LEGS® 摩擦駆動Piezo LEGS® 、ピエゾセラミックアクチュエータの脚部がローターまたは駆動ロッドと直接摩擦接触することで内部予圧により推力 。脚部が歩行を開始する際、常に駆動ロッドと機械的接触を保ちます。
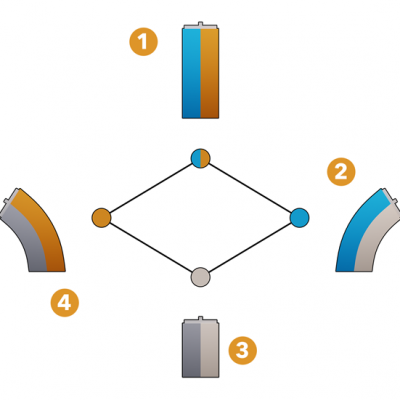
- 左右両方に電圧が印加され、脚が最大限に伸びる
- 脚の左側に電圧をかけ、脚を右側に伸ばす。
- 脚に電圧が印加されていない
- 脚の右側に電圧をかけ、脚を左側に伸ばす。
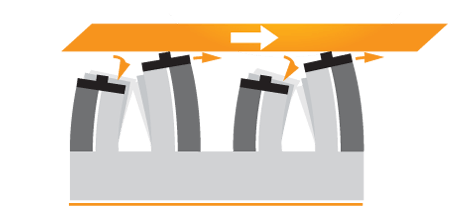
ステップ1
一対の脚はロッドとの接触を維持し、右に動く。二番目のペアは引っ込む。先端は左に曲がる。
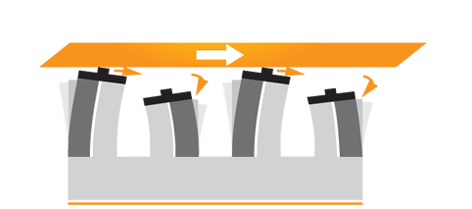
ステップ2
今度は2本目のペアが伸びてロッドの上で位置を変える。先端は右に動く。最初のペアは引っ込み、先端は左に曲がる。
ステップ3
脚の2組目が右に動く。最初のペアが伸び始め、ロッドに向かって上がる。
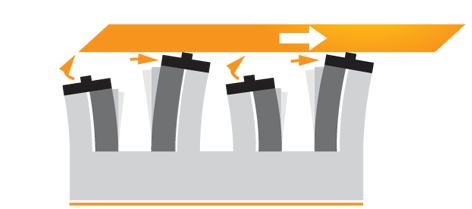
ステップ4
4本の脚はすべて電気的に作動する。

エレクトロニクス
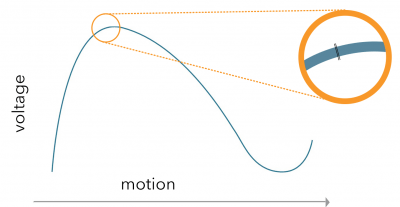
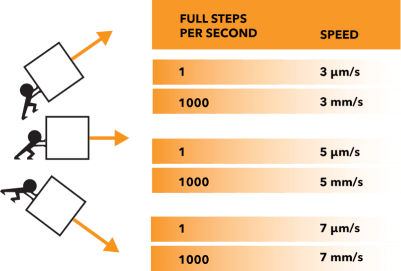
セラミックスに電圧信号を印加することで制御された動作が生成される。ステップ長は下図に示すように負荷に依存する。1フルステップは数千のmicrostepsに分割可能である。マイクロステップの長さはサブナノメートルレベルに達する。
高マイクロステップ分解能向けに最適化された波形
マイクロステップ=波形(フルステップ)の一部;例:microsteps