피에조 레그 기술 모터
피에조 레그®는 로터 또는 구동봉과 직접 마찰 접촉하는 피에조 세라믹 액추에이터 다리의 내부 예압에 의해 힘이 생성되는 마찰 구동 방식으로 작동합니다. 다리가 걷기 시작하면 항상 구동봉과 기계적으로 접촉하게 됩니다.
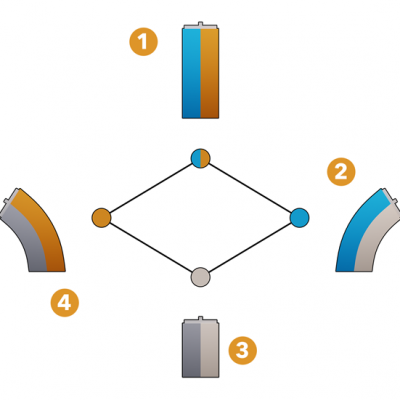
- 왼쪽과 오른쪽 모두에 전압이 가해져 다리가 최대 길이로 확장됩니다.
- 다리의 왼쪽 부분에 전압이 가해져 다리가 오른쪽으로 확장됩니다.
- 다리에 전압이 가해지지 않음
- 다리의 오른쪽 부분에 전압이 가해져 다리가 왼쪽으로 확장됩니다.
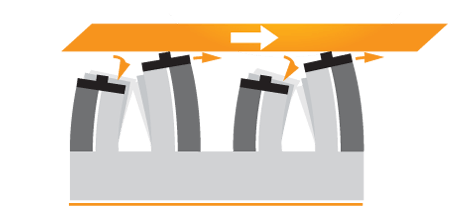
1단계
첫 번째 다리 쌍은 막대와 접촉을 유지하며 오른쪽으로 이동합니다. 두 번째 쌍은 후퇴합니다. 끝이 왼쪽으로 구부러집니다.
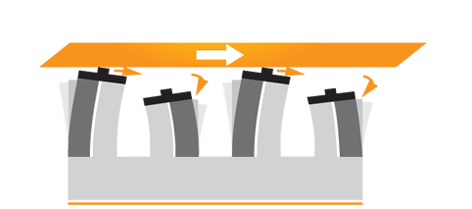
2단계
이제 두 번째 쌍이 막대에서 확장되고 위치가 변경됩니다. 낚싯대의 끝이 오른쪽으로 움직입니다. 첫 번째 쌍이 후퇴하고 끝이 왼쪽으로 구부러집니다.
3단계
두 번째 다리 쌍이 오른쪽으로 움직입니다. 첫 번째 쌍은 막대 쪽으로 뻗어 위로 이동하기 시작합니다.
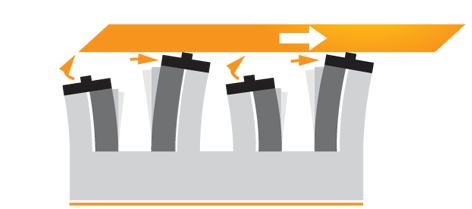
4단계
네 개의 다리는 모두 전기적으로 활성화됩니다.

전자 제품
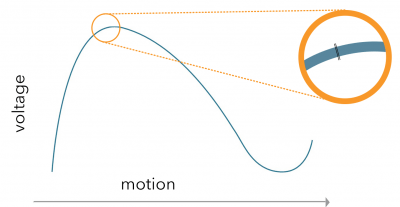
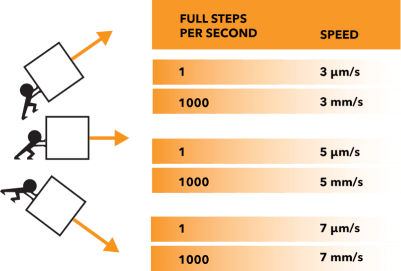
세라믹에 전압 신호를 적용하여 제어 동작을 생성합니다. 스텝 길이는 아래 그림과 같이 부하에 따라 달라집니다. 하나의 전체 스텝은 수천 개의 마이크로 스텝으로 나눌 수 있습니다. 마이크로스텝의 길이는 나노미터 이하 수준까지 내려갑니다.
높은 마이크로스텝 분해능에 최적화된 파형
마이크로스텝 = 파형의 일부분(전체 스텝), 예: 파형당 8192 마이크로스텝.