슈타인마이어 메카트로닉
전자 저장 링 베시 II 실험
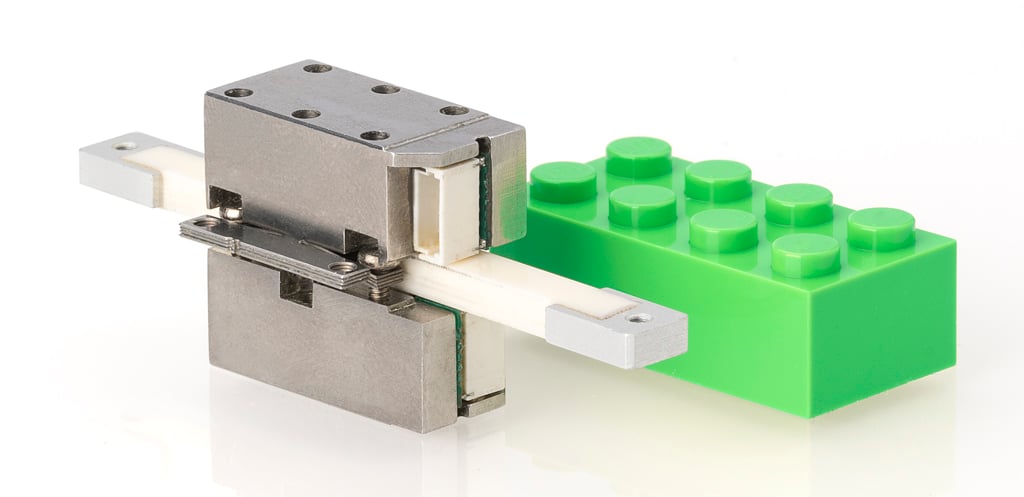
로프에 장착된 압전 마이크로 모터
연구자들을 위한 특별 계약: 베를린의 전자 저장 링 BESSY II에 대한 실험을 위해 포지셔너 전문업체인 Steinmeyer Mechatronik은 샘플 조작기 개발을 의뢰받았습니다. 유연성과 높은 정밀도 외에도 진공과 자기력을 견딜 수 있는 설계가 요구되었습니다. 이 회사는 이 까다로운 작업을 위해 피에조 모터 액추에이터를 사용했습니다.
드레스덴에 본사를 둔 슈타인마이어 메카트로닉의 연구원들은 라이브 회로에서 자성을 3차원으로 시각화하는 것을 목표로 삼았습니다. 이 실험을 위해 과학자들은 싱크로트론 방사광원 BESSY II에서 생성되는 것과 같은 매우 밝은 X-선 광선이 필요했습니다. 전 세계 연구자들은 태양 전지, 수소 생성 재료 또는 양자 물질을 검사하는 등의 실험에 이 광원을 사용할 수 있습니다. 저장 링 측면의 빔 튜브에는 최첨단 분광학 및 현미경 검사 방법이 장착되어 있습니다.
사진: 슈타인마이어 메카트로닉 GmbH
"소위 RICXS 실험은 샘플 조작기, 가이드 시스템을 갖춘 카메라, 샘플 장착 장치 등 여러 요소로 구성된 대규모 설정으로 이루어졌습니다."라고 Steinmeyer Mechatronik의 Elger Matthes는 설명합니다. 고정밀 포지셔닝 애플리케이션을 전문으로 하는 이 회사는 혁신적인 제품과 특정 요구 사항에 맞는 맞춤형 솔루션을 제공합니다. Steinmeyer Mechatronik은 베를린의 연구원들과 같은 실험 애플리케이션을 위한 복잡한 다축 시스템과 일회성 시스템뿐만 아니라 OEM 시리즈의 개발 및 생산에 중점을 두고 있습니다.
RICXS 실험을 위해서는 장착된 전자 회로를 초전도체 벡터 자석의 자기장으로 끌어올려 고강도 광원에 노출시키는 5축 조작기를 만들어야 했습니다. "궤도를 도는 카메라로 확산 방사선을 촬영하여 3차원 이미지를 생성했습니다."라고 Matthes는 원리를 설명합니다. 이 실험은 특정 단파장 X-선 스펙트럼이 필요했기 때문에 10E-8 mbar의 초고진공 환경에서만 작동할 수 있었습니다.
까다로운 환경에 적합한 액추에이터
슈타인마이어 메카트로닉은 이 애플리케이션에 가장 적합한 파트너가 누구인지 빠르게 파악했습니다: 이 회사는 15년 이상 피에조모터와 성공적인 협력 관계를 유지해 왔습니다. "우리는 항상 매우 작은 스텝과 긴 이동거리와 함께 매우 높은 해상도와 정밀도가 요구되는 애플리케이션에 피에조 모터를 사용합니다."라고 Matthes는 설명합니다. 피에조 모터는 압전을 사용하여 움직임을 생성합니다. 압전 물질에 전압이 가해지면 압전 물질이 팽창합니다. 피에조 모터는 세라믹으로 만들어져 옆으로 길어지고 구부러질 수 있는 피에조-LEGS®를 개발했습니다. 이로 인해 서브미크론에서 나노미터 범위의 동작이 가능합니다. 이 액추에이터는 자체 잠금 기능이 있어 기계적 안정성으로 위치를 유지하며 전원이 꺼진 상태에서도 에너지를 소비하지 않습니다.
피에조 모터의 장점은 윤활유가 필요 없고 마모나 열 증발을 일으키지 않는다는 것입니다. 따라서 진공 환경에서 사용하기에 이상적입니다. 전기 모터의 권선 없이 설계되었기 때문에 자속의 원인이 되지 않으며 자기 간섭에 민감하지 않아 기존 모터가 바람직하지 않은 상호작용을 일으키는 애플리케이션에도 적합합니다. 피에조모터는 완전 비자성 모터를 제공합니다. "초고진공과 결합된 극도의 자성은 기존 모터의 까다로운 조건입니다."라고 Steinmeyer Mechatronik의 엘거 마테스는 말합니다. "이 프로젝트의 정밀도에 대한 특별한 요구 사항과 결합하여 피에조 모터는 뛰어난 솔루션을 제공했습니다."
사진: 슈타인마이어 메카트로닉 GmbH
5개의 축으로 유연한 모션
그 결과 1년의 개발 기간 끝에 PiezoMotor의 6개의 선형 모터를 사용하는 작은 작동 거리를 위한 5축 매니퓰레이터가 탄생했습니다. 나중에 샘플이 자력에 노출되는 플랫폼은 장력 스프링으로 6개의 로프 쌍에 고정됩니다. 설치 공간이 신발장 크기로 제한되어 있기 때문에 로프를 사용했습니다. 로프 덕분에 설계자는 이제 모서리로 힘을 전달할 수 있게 되었습니다. 6개의 로프 쌍은 공간에서 플랫폼의 위치를 정의합니다: 로프를 당기면 플랫폼이 그에 따라 움직입니다. 로프가 작동력을 전달하고 스프링이 반력을 생성하여 중력을 보정합니다. "마치 인형극처럼 작동합니다."라고 Matthes는 말합니다. "로프는 고객이 제공한 기발한 아이디어였습니다: 매우 좁은 공간에서 나노미터 단위의 해상도와 안정성으로 작동하는 복잡한 메커니즘을 구축할 수 있게 해줍니다."
피에조 모터는 수 나노미터의 기계적 분해능과 무한한 이동거리, 엄청난 강성을 자랑합니다. 전기 모터는 백래시 없는 작동을 위해 지속적으로 제어해야 하는 반면, 피에조 모터는 이 문제를 본질적으로 해결합니다. 모터의 액추에이터로드는 항상 피에조 요소와 직접 접촉하지만, 다리와 액추에이터로드 사이의 마찰 커플링은 매우 짧은 반응 시간과 높은 분해능과 함께 백래시가 전혀 발생하지 않습니다. 클램핑과 이동이 동일한 액추에이터에 의해 수행되기 때문에 정지 시 전력 소비 없이 강력한 연동이 보장됩니다. 수상 경력에 빛나는 RICXS 실험에서 샘플의 위치는 6개의 정전식 센서로 제어되었습니다. "모터는 스텝을 밟지만 스텝의 길이는 다양합니다."라고 엘거 마테스는 설명합니다. 센서가 스텝 간격을 측정하고 모터를 제어합니다. 이를 위해서는 폐쇄 루프 작동이 필요합니다."
사진: 슈타인마이어 메카트로닉 GmbH
복잡한 시스템을 설정하고 작동할 준비가 되기까지 1년이 더 걸렸습니다. 피에조모터 액추에이터는 RICXS 실험에서 엑스레이 카메라 조정과 샘플 장착에도 사용되었습니다. 이 독특한 샘플 조작기를 통해 자기력에 대한 수많은 과학 실험을 수행할 수 있었습니다.