6.5N リニアアクチュエーター、非磁性、真空対応
Piezo LEGS® リニアモーターは、狭いスペースでの要件を伴うOEM用途向けに設計されており、通常環境、磁気環境、真空環境における精密な位置決めを重視しています。
推力6.5N、非磁性、真空対応。
- 真のリニアダイレクトドライブ
- 真空対応バージョン
- 非磁性バージョン
- 通常バージョン
- サブナノメートルレベルまでの解像度
- 6.5 N推力
- 0~74.5mmストローク
- 自動ロック
- バックラッシュなし
Piezo LEGS® LL10 リニアアクチュエーター
真のダイレクトリニア駆動
LL10リニアモーターは、完全非磁性や真空対応が求められる環境での精密位置決めを主眼に、幅広いOEM用途向けに設計されています。 Piezo LEGS®のダイレクトドライブ方式により、機械的な遊びやバックラッシュのない動作を保証します。非常にコンパクトかつ強力なこのモーターを使用すれば、サブミクロン単位の移動も容易です。より優れた分解能となめらかな直線運動が必要な場面において、従来のステッピングモーター・ユニットに代わる画期的なソリューションとなります。
真空対応
真空対応モデルでは、アウトガス(放出ガス)を最小限に抑えるためのコンポーネントを採用し、特別な処理を施しています。また、最大125°Cまでの温度でベーキング(脱ガス加熱)を行うことが可能です。
非磁性
モーターの核となるピエゾセラミック・アクチュエータは本質的に非磁性であり、モーターハウジングやその他の部品にも非磁性合金が使用されています。モーターハウジングから10mmの距離における磁束密度は1nT未満(基準測定におけるセンサー感度以下)です。
仕様 Piezo LEGS® LL10
| 種類 | ノーマル(A) | 非磁性 - 真空 (D) | 単位 |
| 最大ストローク | 74.5 | mm | |
| 最高速度 ドライバーに依存 | 15 | mm | |
| 最低速度 運転者による | 1 | μm | |
| 失速推力 | 6.5 | N | |
| 保持推力 | >6.5 | N | |
| 真空 | いいえ | はい | |
| 非磁性 | いいえ | はい | |
| 動作電圧 | 42-49 | V | |
| 消費電力 | 5 | mW/Hz | |
| 外形寸法(幅×高さ×奥行き) ガイドおよびエンコーダ付き | N/A | mm | |
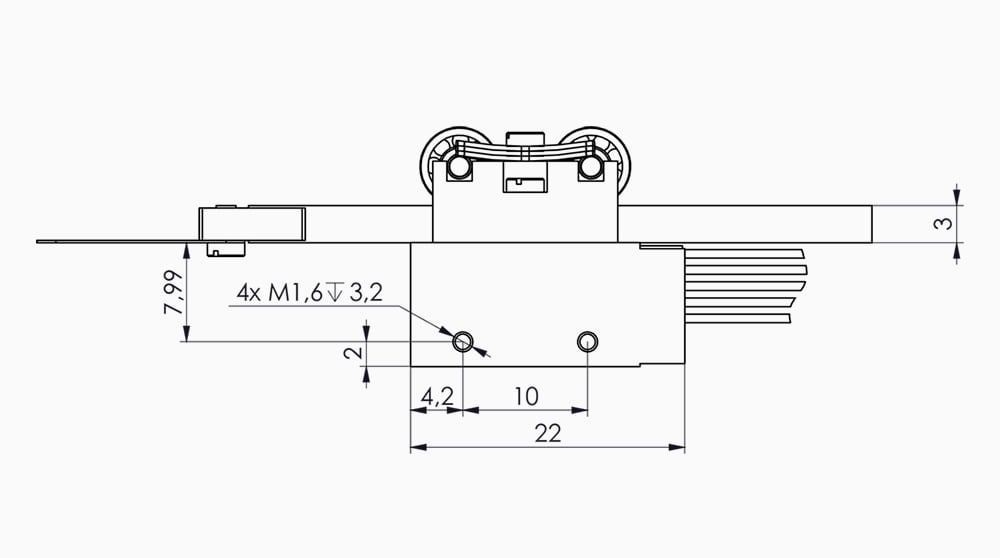
| 外形寸法(幅×高さ×奥行き) ガイドおよびエンコーダを除く | 22 x 19.3 x 10.8 | mm | |
| 重量 50mm ロッド付き | 23 | グラム | |
| モーターハウジングの材質 | ステンレス鋼 | アルキャップ | |
| 動作温度 推奨 | -20~+70 | ℃ | |
| コネクタモーター | ケーブルはJST 05SR-3Sで半田付け | ||
| コネクタエンコーダ | N/A | ||
| 解像度モーター | <1 | nm | |
| 内蔵エンコーダ | いいえ | ||
| エンコーダ分解能 | N/A | nm | |
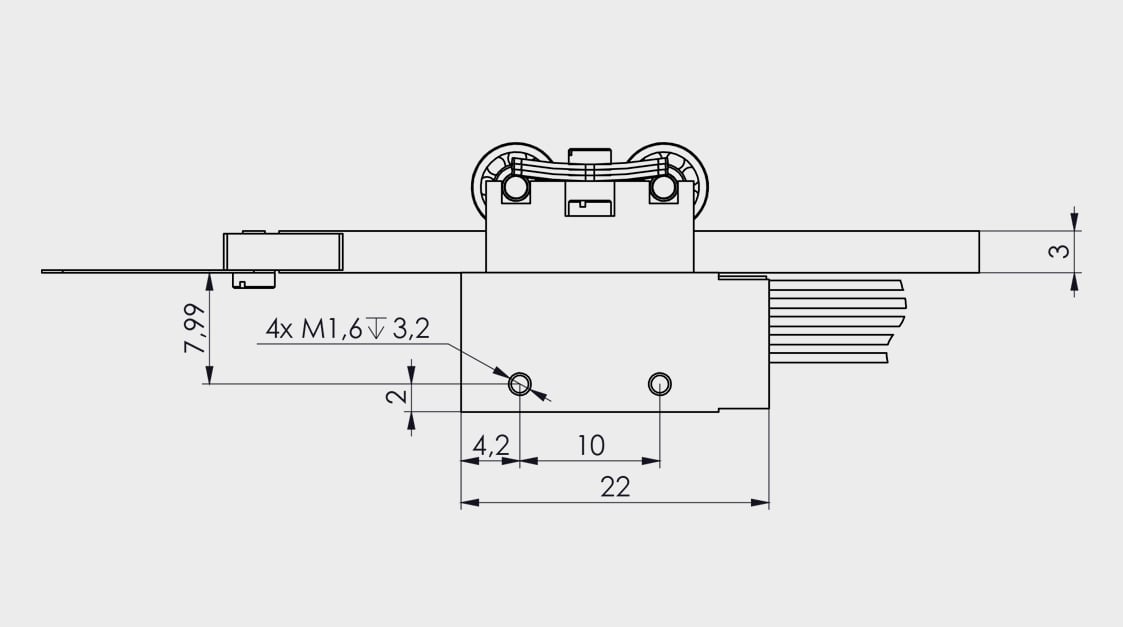
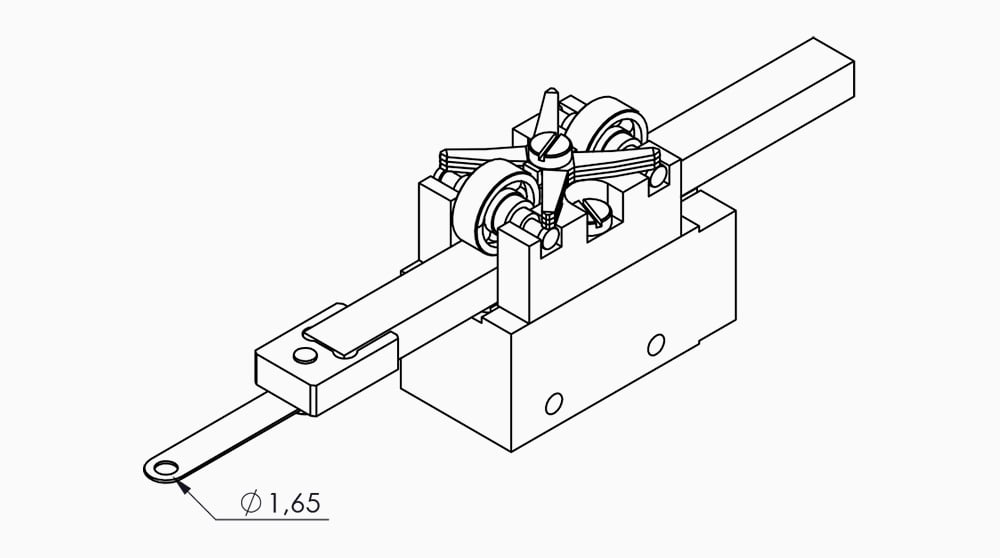
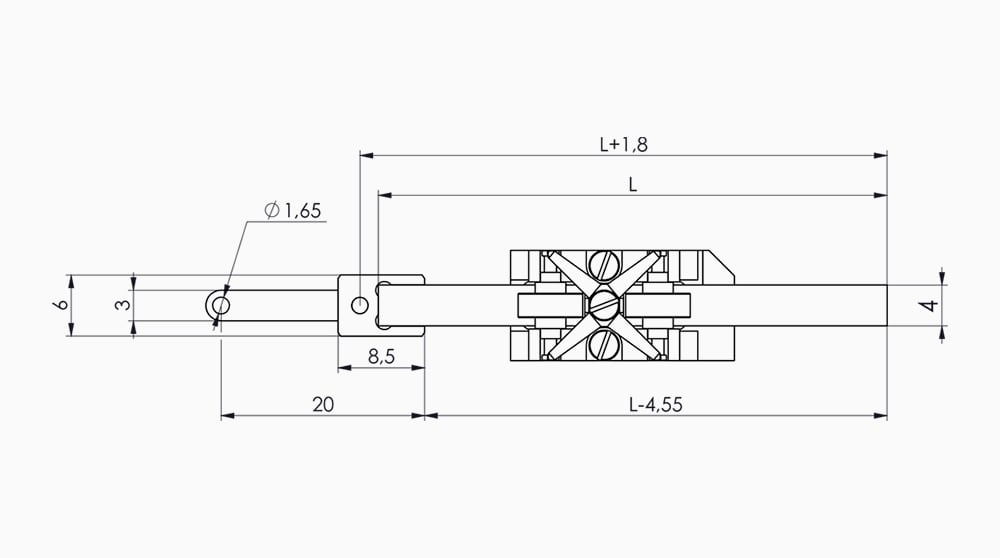
Piezo LEGS® LL10 の寸法
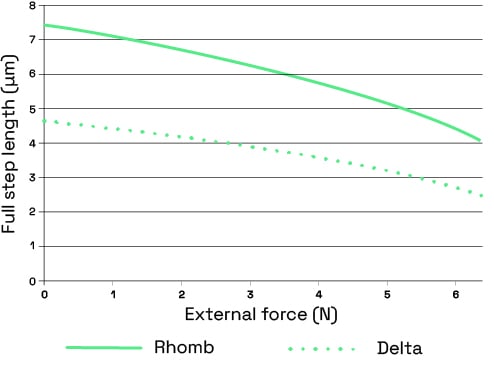
モーター性能
Rhomb波形(実線)とDelta波形(点線)によるモーター特性。フルステップ長とは、脚が1フルステップ(すなわち波形1サイクル)したときのドライブロッドの平均移動距離。
注:0.5μmの標準偏差σを考慮する必要あり。代表的な値は20℃での値。
ストローク範囲
|
1アダプタあたりのストローク(mm)
|
ドライブロッド長(mm)
|
|
0-3.4
|
30
|
|
0-13.4 |
40
|
|
0-23.4 |
50
|
|
0-33.4 |
60
|
|
0-43.4 |
40
|
|
0-74.5 |
101
|
20ºC でのモーター速度 (missing)
|
波形
|
最大周波数 (Hz)
|
速度範囲 (mm/s)
|
|
Rhomb
|
3000
|
0-15
|
|
Delta |
3000
|
0-24
|

モーターの制御
当社のモーター制御ユニットには、実験室用やOEM機器への組み込み用など、さまざまなタイプのコントローラやアンプを備えたモデルが多数用意されています。
また、独自のドライバー用電子機器を自社で開発したいお客様には、ドライバーのライセンス供与も可能です。

スターターキット
当社のスターターキットは、評価を簡素化し開発を加速するよう設計されています。複数の構成で提供され、選択したモータープラットフォームのテストと統合を開始するために必要なすべてを提供します。
各キットには、モーターを評価するために必要な部品が含まれています。
