高精度リニア6.5Nピエゾアクチュエーター
Piezo LEGS® ピエゾリニアアクチュエーター(エンコーダー内蔵・ガイド内蔵)は、狭小空間での精密位置決めを重視したOEM用途向けに設計されています。
推力6.5N、卓越したサイズ対推力比 、ナノレベル精度
- 6.5 N推力
- ナノメートル級の精度
- 高分解能光学式エンコーダー
- ダイレクトドライブ - バックラッシュフリー
- 静止保持時の電力消費なし
- 電源喪失時のセルフロック
- 素早いレスポンスと高速ダイナミクス
Piezo LEGS® リニアアクチュエータ
6.5Nのリニア・ダイレクトドライブ・ピエゾアクチュエーターは、重量わずか16gと非常にコンパクト。バックラッシュのない真のダイレクトドライブで、サブナノメートル領域でのマイクロステップが可能です。このコンパクトなリニアアクチュエーターは、内蔵エンコーダー(例:1.25 µmまたは80 nm)やガイドの有無が選択可能です。
LL06は、高分解能位置センサーを搭載し、さまざまな長さのドライブロッド(30、40、50、60、100.8 mm)をご用意しています。モーターは簡単に組み込むことができ、システムの簡素化と小型化を実現します。
保持力 6.5ニュートン 電源オフ時ロック安全機能。
モーターの制御には、さまざまなドライバーとコントローラーをご用意しています。
仕様Piezo LEGS®
|
種類 |
標準 |
|
最大ストローク |
74.1mm |
|
速度範囲(菱形波形、無負荷、20℃) |
0.1nm/s ~ 20mm/s(ドライバを確認してください) |
|
ステップ長、フルステップ @ デルタ、無負荷、20℃ |
4.5 µm(図参照) |
|
最高速度(ドライバーおよび波形に依存) |
12時間で1歩分 |
|
最大動作周波数(ドライバに依存) |
2.5 kHz |
|
運動分解能 |
<1nm |
|
失速推力 |
6.5 N |
|
保持推力 |
>6.5 N |
|
真空 |
いいえ |
|
非磁性 |
いいえ |
|
動作電圧 |
0~48 V(独自波形) |
|
消費電力 |
5 mW/Hz |
|
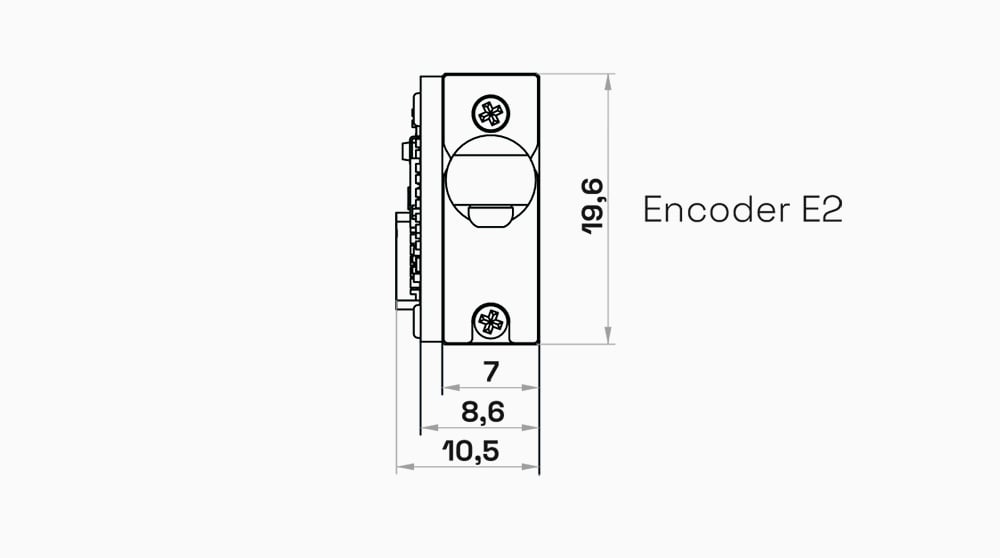
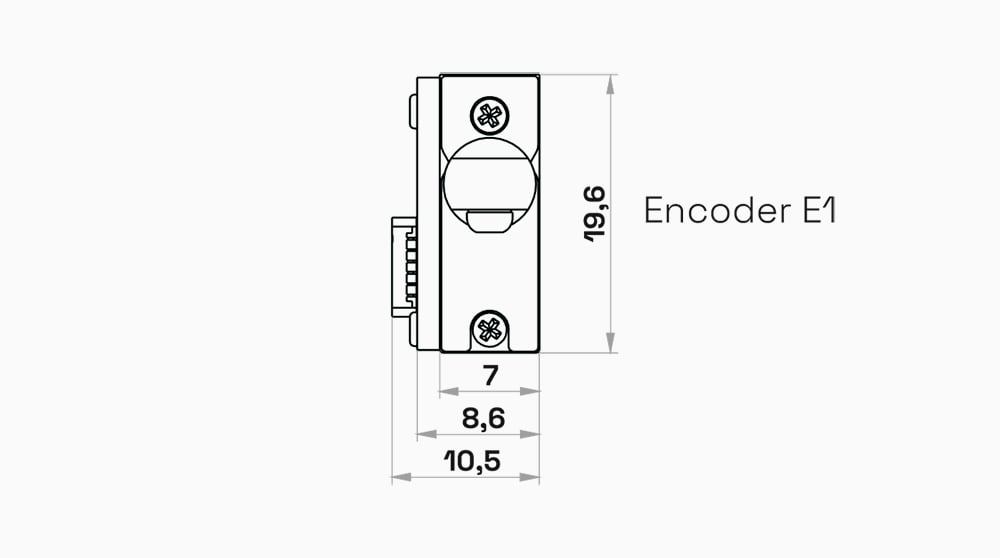
ガイドおよびエンコーダを含む機械的寸法(幅×高さ×奥行き) |
23.4 × 19.6 × 10.5mm |
|
ガイドおよびエンコーダを除く機械的寸法(幅×高さ×奥行き) |
17 × 19.6 × 10.5mm |
|
50mm ロッドを装着した状態の重量 |
16 g |
|
モーターハウジングの材質 |
ステンレス鋼 |
|
動作温度(推奨) |
-20~+70°C |
|
保管温度 |
-20~+70°C |
|
内蔵エンコーダ(30mm には非対応) |
はい、任意です |
|
エンコーダの分解能(エンコーダ E1) |
1.25(エンコーダーE1、ガイドG1) |
|
エンコーダの分解能(エンコーダ E2) |
0.08 µm |
|
コネクタモーター(モーター側) |
ヒロセDF52-5S-0.8H |
|
コネクタエンコーダ(モーター側) |
ヒロセDF52-6S-0.8H |
|
制御 |
オープンループまたはクローズドループ |
|
耐用年数(km) |
11km(半負荷、室温条件、600Hz) |
|
目次 |
1回のフルストロークにつき最大2つ |
|
最大加速度 |
800Hz/ms |
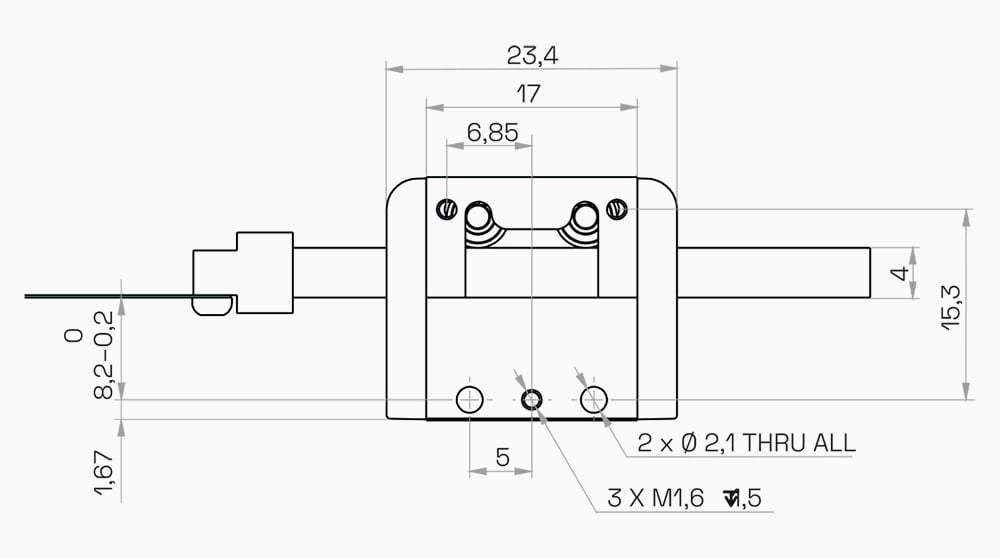
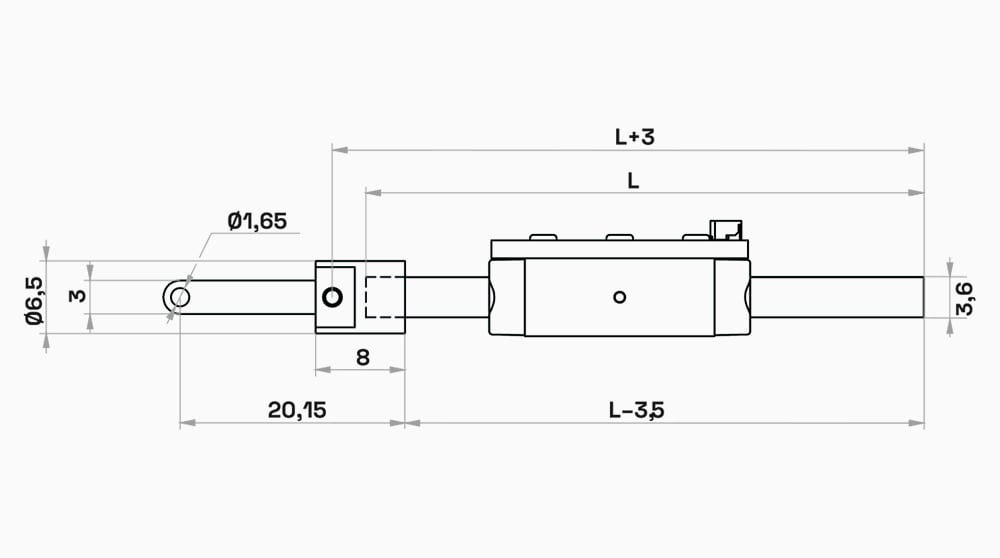
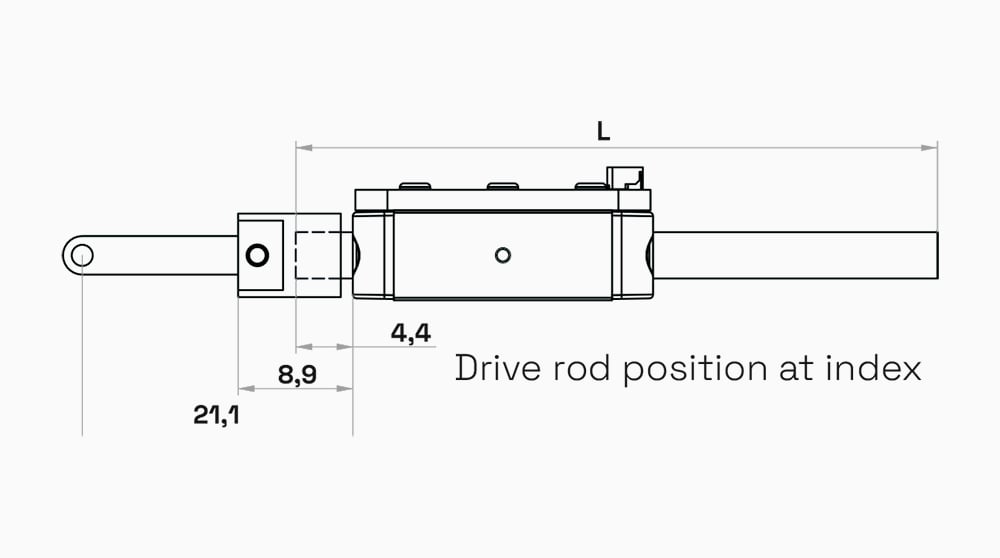
Piezo LEGS® の寸法
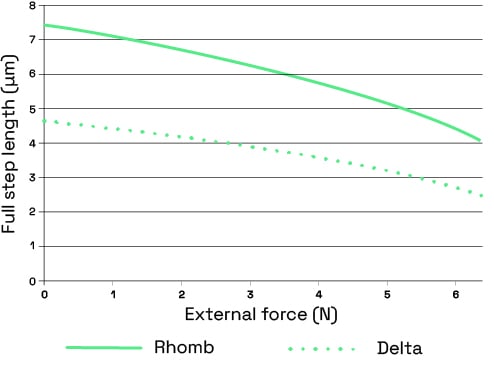
モーター性能 LL06
Rhomb波形(実線)とDelta波形(点線)によるモーター特性。フルステップ長とは、脚が1フルステップ(すなわち波形1サイクル)したときのドライブロッドの平均移動距離。
注:0.5μmの標準偏差σを考慮する必要あり。代表的な値は20℃での値。
ストローク範囲 LL06
|
1アダプタあたりのストローク(mm)
|
ドライブロッド長(mm)
|
|
0-3.1
|
30(エンコーダーでは使用不可)
|
|
0-13.1 |
40
|
|
0-23.1 |
50
|
|
0-33.1 |
60
|
|
0-74.1 |
100.8
|
20 ºCにおけるモーター速度
|
波形
|
最大周波数 (Hz)
|
速度範囲 (mm/s)
|
|
Delta
|
3000
|
0-15
|
|
Rhomb |
0-24
|
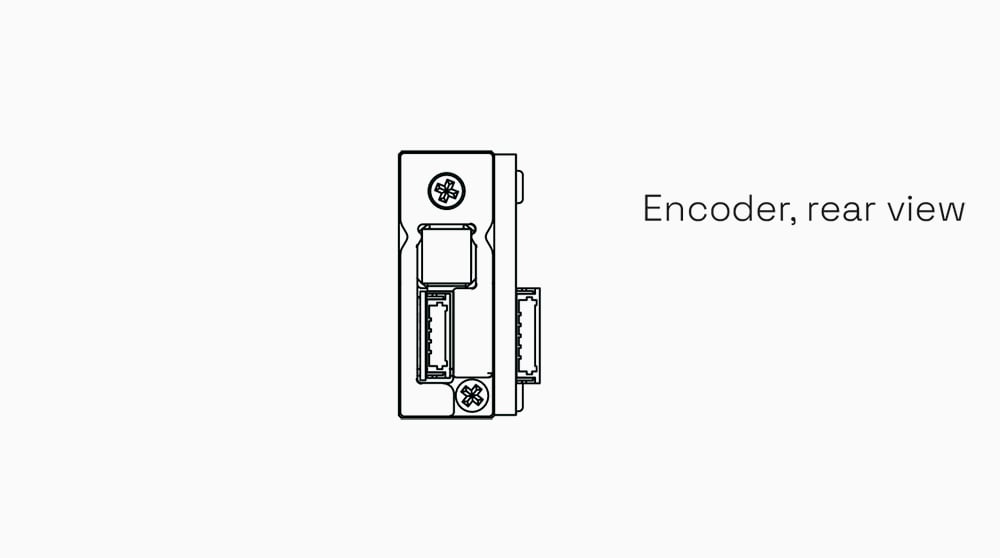
LL06 前後

- モーターハウジング|2.ドライブロッド|3.フロントアダプター|4.ドライブロッド上のエンコーダースケール|5.内蔵エンコーダ、1.25µm - 80 nm分解能|6.ビルトインガイド

モーターの制御
当社のモーター・コントロール・ユニットには、OEM機器への組み込み用だけでなく、実験室用のコントローラーやアンプなど、さまざまなバージョンがあります。これらのコントローラーはコンパクトリニアアクチュエーターと互換性があり、最適な性能を発揮します。
また、独自のドライバー用電子機器を自社で開発したいお客様には、ドライバーのライセンス供与も可能です。

スターターキット
当社のスターターキットは、評価を簡素化し開発を加速するよう設計されています。複数の構成で提供され、選択したモータープラットフォームのテストと統合を開始するために必要なすべてを提供します。
各キットには、モーターを評価するために必要な部品が含まれています。

LL06の構成とお見積り
