シュタインマイヤー・メカトロニック
電子蓄積リング「ベッシーII」の実験
ロープ上の圧電マイクロモーター
研究者向けの特別契約:ベルリンの電子蓄積リング BESSY II での実験のために、ポジショナーのスペシャリストであるスタインマイヤー・メカトロニクス社にサンプルマニピュレータの開発が依頼されました。柔軟性と高精度に加え、真空および磁力に耐える設計も要求条件に含まれていました。同社は、この困難な課題にPiezoMotor を採用しました。
ドレスデンを拠点とするシュタインマイヤー・メカトロニック社に依頼した研究者たちの目標は、生きた回路における磁気の3次元可視化だった。彼らの実験には、放射光源BESSY IIから発生するような非常に明るいX線光が必要だった。世界中の研究者が、太陽電池、水素発生用材料、量子材料などの実験にこの光源を利用できる。蓄積リングの脇にあるビーム管には、最先端の分光法や顕微鏡法が装備されている。
写真シュタインマイヤー・メカトロニック社
「いわゆるRICXS実験は、試料マニピュレーター、ガイドシステム付きカメラ、試料設置装置など、いくつかの要素を備えた大型のセットアップで構成されていました」と、シュタインマイヤー・メカトロニックのエルガー・マテスは説明する。高精度位置決めアプリケーションを専門とする同社は、革新的な製品と、特定の要件に合わせたカスタムメイドのソリューションを提供している。シュタインマイヤー・メカトロニック社は、ベルリンの研究者のような実験的用途のための複雑な多軸システムやワンオフシステムだけでなく、OEMシリーズの開発・生産にも力を入れている。
RICXS実験では、5軸マニピュレーターの製作が必要で、搭載された電子回路を超伝導ベクトル磁石の磁場内に上昇させ、そこで高輝度光源を照射した。拡散放射を周回するカメラで撮影し、3次元画像を生成した」とマテスは原理を説明する。これには特定の短波長X線スペクトルが必要なので、この実験は10E-8mbarの超高真空環境でのみ機能する。
厳しい環境に適したアクチュエータ
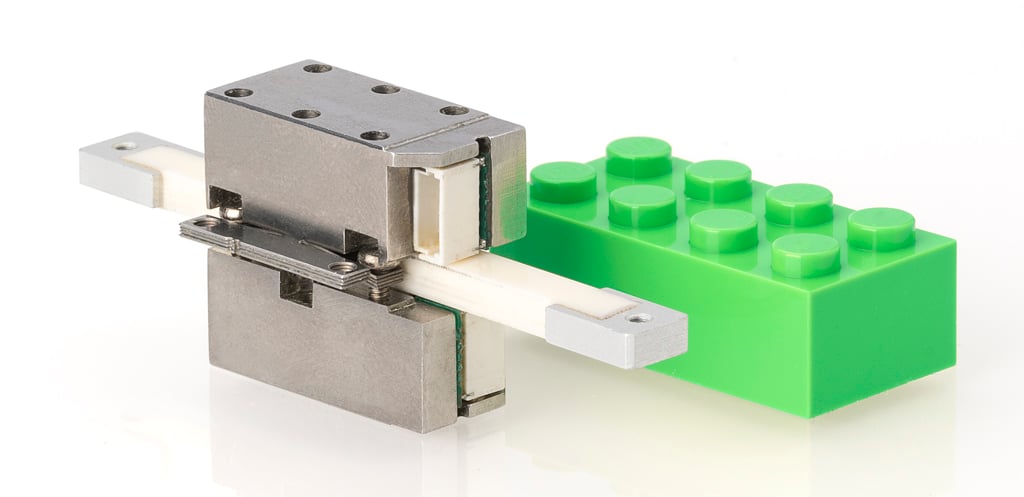
スタインマイヤー・メカトロニクス社は、この用途に最適なパートナーが誰であるかをすぐに理解しました。同社は 15PiezoMotor と成功裏に協力関係を築いてきました。「当社は、非常に高い分解能と精度、そして非常に小さなステップと長い移動距離を必要とする用途には、常にピエゾモーターを使用しています」と、マテス氏は説明します。ピエゾモーターは、圧電効果を利用して動きを生み出します。 圧電材料に電圧が印加されると、その材料は膨張します。PiezoMotor 、セラミック製のPiezo-LEGS® を PiezoMotor この製品は、長さを伸ばすことも、横方向に曲げることもできます。これにより、サブミクロンからナノメートルの範囲の運動が発生します。このアクチュエータはセルフロック式であるため、機械的な安定性でその位置を保持し、電源がオフの状態ではエネルギーを消費しません。
ピエゾモーターの利点は、潤滑剤を必要とせず、摩耗や熱蒸発を引き起こさないことです。これにより、真空環境での使用に最適です。電気モーターの巻線を使用しない設計であるため、磁束の発生源とならず、磁気干渉の影響も受けません。そのため、従来のモーターでは望ましくない相互作用が生じる用途にも適しています。PiezoMotor 、完全に非磁性のPiezoMotor 。 「超高真空と極端な磁気が組み合わさった環境は、従来のモーターにとっては厳しい条件です」と、スタインマイヤー・メカトロニク社のエルガー・マテス氏は述べています。「このプロジェクトでは、精度に関する特別な要件も加わっていたため、ピエゾモーターは卓越したソリューションとなりました」
写真シュタインマイヤー・メカトロニック社
5軸による柔軟な動き
1年間の開発期間を経て完成したのは、PiezoMotorリニアモーター6基を用いた微小作動距離対応の5軸マニピュレーターである。サンプルが磁気力を受けるプラットフォームは、張力ばねを備えた6組のロープペアに固定されている。設置スペースが靴箱サイズに制限されていたため、ロープが採用された。 ロープの採用により、設計者は推力 導くことが可能となった。6組のロープが空間におけるプラットフォームの位置を定義する:ロープを引っ張るとプラットフォームがそれに応じて移動する。ロープが作動推力伝達する一方、スプリングは反作用力を発生させ、推力相殺する。 「まるで人形劇の仕組みです」とマテスは説明する。「ロープは顧客から提案された素晴らしいアイデアでした。これにより、ナノメートル単位の精度と安定性を保ちながら、極めて狭い空間で動作する複雑な機構の構築が可能になったのです」
ピエゾモーターは数ナノメートルの機械的分解能を持ち、無制限の移動量と驚異的な剛性を兼ね備えています。エレクトロモーターがバックラッシュのない動作のために常に調整する必要があるのに対し、ピエゾモーターはこの問題を本質的に解決しています。モータのアクチュエータロッドは常にピエゾ素子と直接接触していますが、脚とアクチュエータロッド間の摩擦結合により、極めて短い反応時間と高分解能とともに、ゼロバックラッシを実現します。クランプと移動は同じアクチュエータで行われるため、強力なインターロックが保証され、停止時の電力消費はありません。受賞したRICXS実験のサンプルの位置は、6つの静電容量式センサーで制御された。「モーターはステップを踏みますが、ステップの長さは様々です。センサーがステップ間隔を測定し、モーターを制御します。これにはクローズド・ループ動作が必要です」。
写真シュタインマイヤー・メカトロニック社
この複雑なシステムの設置にはさらに1年を要し、稼働準備が整った。RICXS実験では、X線カメラの調整と試料取り付けにもPiezoMotor 使用された。この独自の試料マニピュレーターにより、磁力に関する数多くの科学実験の実施が可能となった。